5238-E P-349
SECTION 15 APPENDIX
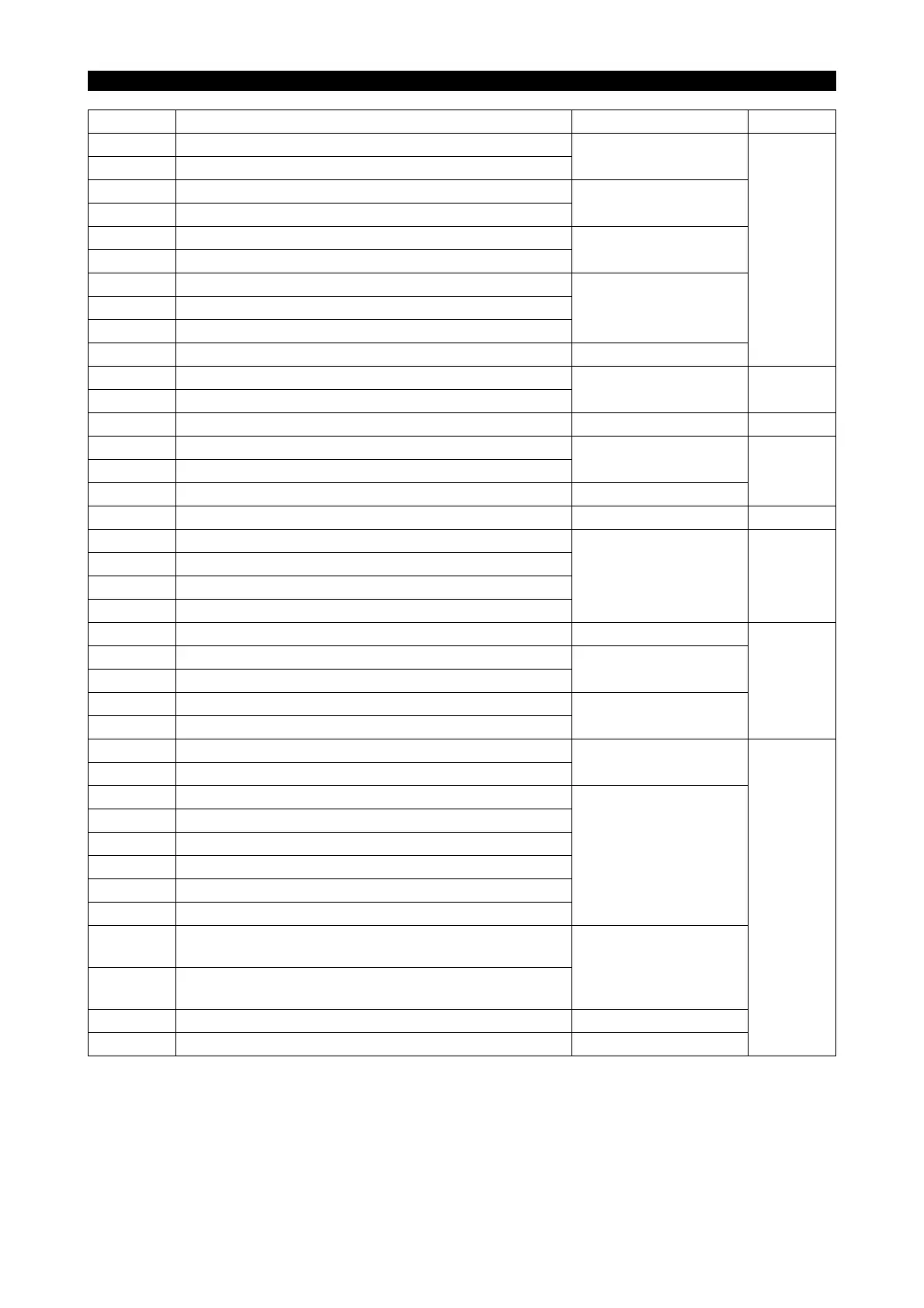
*: System variables are not available depending on machine specifications.
VSKFA Gauging feedrate 2
1 to 500
None
VSKFB Gauging feedrate 1
VCHKL Chuck jaw dimension L1
0 to 9999.999
VCHKD Chuck jaw dimension D1
VCHKZ Chuck jaw position CZ
0 to ±9999.999
VCHKX Chuck jaw position CX
VTSL Tailstock spindle projection L2
0 to 9999.999VTSDA Tailstock spindle diameter D2
VTSDB Tailstock center diameter D3
VWKR Workpiece end face WR 0 to ±9999.999
VRZV Robot point data Z-axis
0 to 99999999 1 to 99
VRCV Robot point data C-axis
VRRG Robot register data 0 to ±32767 1 to 47
VLZV Loader point data Z-axis
0 to ±99999999
1 to 99VLYV Loader point data Y-axis
VLRG Loader register data 0 to ±32767
VPLOF M-axis zero offset for flat turning 0 to 359.999 None
VRYV Robot point data Y-axis
0 to ±99999999 1 to 99
VRBV Robot point data B-axis
VRWV Robot point data W-axis
VRXV Robot point data X-axis
VTLMT Tool type number 0 to 80
I = 1 to 38
J = 1 to 4
K= 1 to 6
VMXA1 MAX in tool nose form code table A1
0 to 360.000
VMNA1 MIN in tool nose form code table A1
VMXA2 MAX in tool nose form code table A2
0 to ±360.000
VMNA2 MIN in tool nose form code table A2
VCHIO Chuck ID grip/OD grip changeover data
0, 1
None
VCHSW Chuck work/between-centers work changeover data
VZARP Designated ZA-axis position
0 to 99999999
VZBRP Designated ZB-axis position
VZCRP Designated ZC-axis position
VXARP Designated XA-axis position
VXBRP Designated XB-axis position
VWAP Designated W-axis position
VSNWD
Dislocation between the sensor center and the sensor
head in the C-axis forward rotation
READ ONLY
VSNTU
Dislocation between the sensor center and the sensor
head in the C-axis reverse rotation
VRUND 360 constant -
VUNIT Unit system 0 to 7
Variables Contents Setting Range Suffix