Oxford Technical Solutions Ltd Page 42 of 110
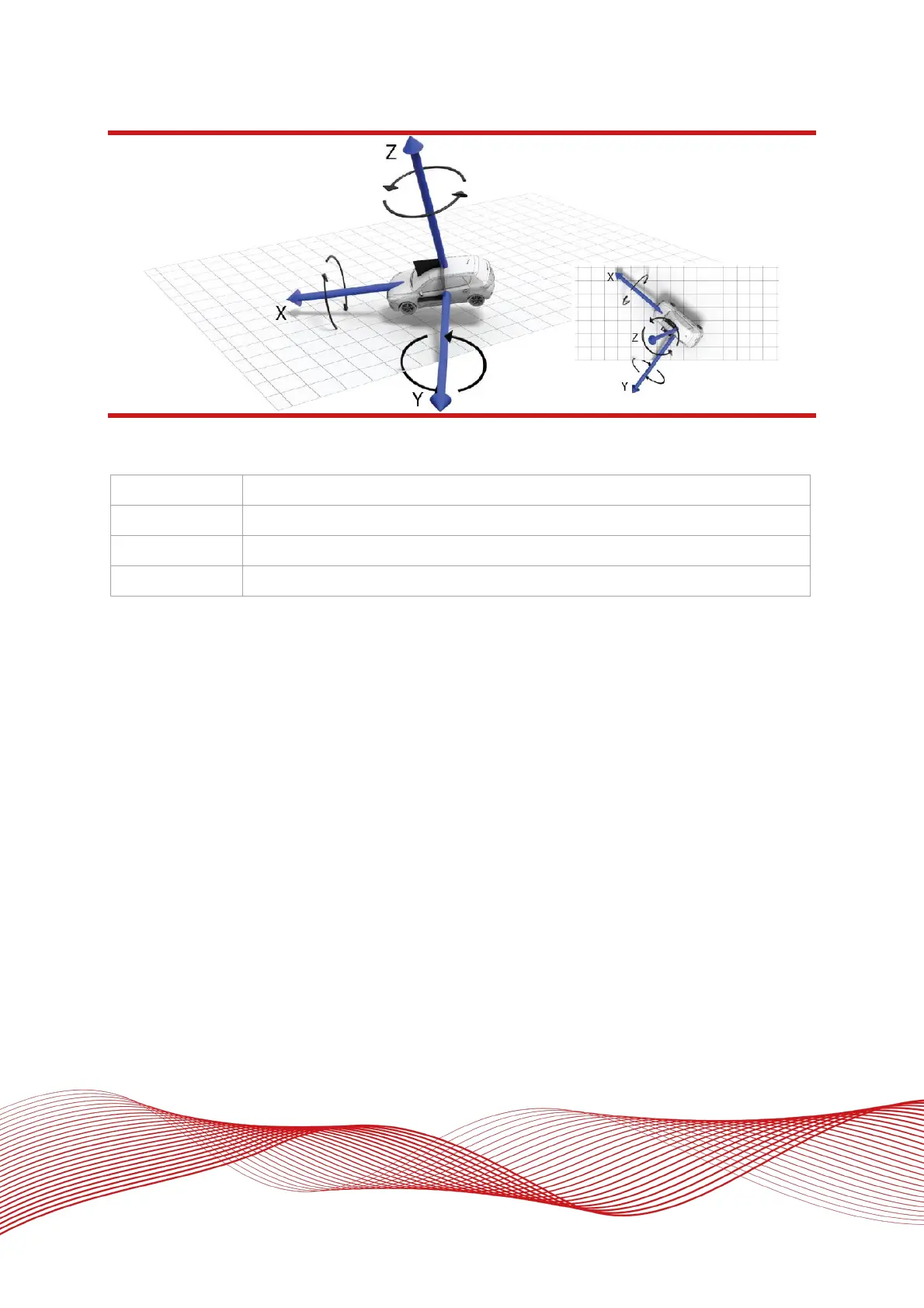
Figure 16: ISO 8855 vehicle system
Table 21: ISO 8855 vehicle system
X This is the forward direction of the vehicle
Y This is the left direction of the vehicle
Z This is the up direction of the vehicle
The ISO vehicle frame is attached to the vehicle and rotates with it in all three axes. The X-axis remains parallel
to the vehicle’s heading, while the Y-axis points to the left and is perpendicular to the vehicle’s vertical plane
of symmetry.
Ethernet configuration
To configure the RT for unrestricted data transmission it is necessary to use the Ethernet connection. The
operating system at the heart of the RT products allows connection to the unit via FTP. The use of FTP allows
the user to manage the data logged to the unit; files can be downloaded for reprocessing and deleted to make
space for future files. Configuration files for alternative configurations require FTP to put the configuration files
on to the RT. The default username and password are both “user”.
The RT outputs its data over Ethernet using a UDP broadcast. The use of a UDP broadcast allows everyone on
the network to receive the data sent by the RT. The data rate of the UDP broadcast is 100 Hz, 200 Hz or 250 Hz.
Each RT is configured with a static IP address, to enable communication by ethernet. You can find the unit’s IP
address by doing the following:
• For a v3 or v4 unit, connect your laptop to the unit via ethernet and open:
o NAVconfig, where the unit should be available to configure
o NAVdisplay, where you can select the unit to view real time data