Oxford Technical Solutions Ltd Page 11 of 110
Internal data logging enables the data to be reprocessed post-mission. Data can be collected in the unit,
downloaded using File Transfer Protocol (FTP), processed on a PC and viewed using NAVdisplay.
Easy operation
There is minimal configuration required to use the system. The configuration can be saved to the RT so it can
operate autonomously without user intervention. A lot of work has been put into the initialisation of the inertial
algorithms so the RT can reliably start to navigate in the vast majority of situations.
The single unit contains inertial sensors, GNSS receiver, data storage and CPU. One or two antennas need to be
mounted outside the vehicle where they have a clear view of the sky. A 10–50 V dc power supply can be obtained
from most vehicles. A laptop computer allows real-time viewing of the results.
Self-correcting
Unlike conventional inertial navigation systems, the RT uses GNSS to correct all its measurements. GNSS
makes measurements of position, velocity and (for dual antenna systems) heading. Using these
measurements, the RT is able to keep other measurements, such as roll and pitch, accurate. Tight coupling of
the GNSS and inertial measurements means the raw GNSS data can also be used. There is no drift from the RT
in any of the measurements while GNSS is present.
Advanced processing
In poor GNSS environments, drift times can be halved by using the combined results of processing forwards
and backwards in time. Our proprietary gx/ix™ processing engine can further improve performance with single
satellite aiding algorithms and tight coupling of the inertial and GNSS measurements, meaning position
updates even with fewer than four satellites in view.
Related documents
This manual covers the installation and operation of RT systems, but it is beyond its scope to provide details
on service or repair. Contact OxTS support or your local representative for customer service-related inquiries.
Additional manuals provide further information on some of the software and communication types mentioned
in this manual. Table 1 lists related manuals and where to find them.
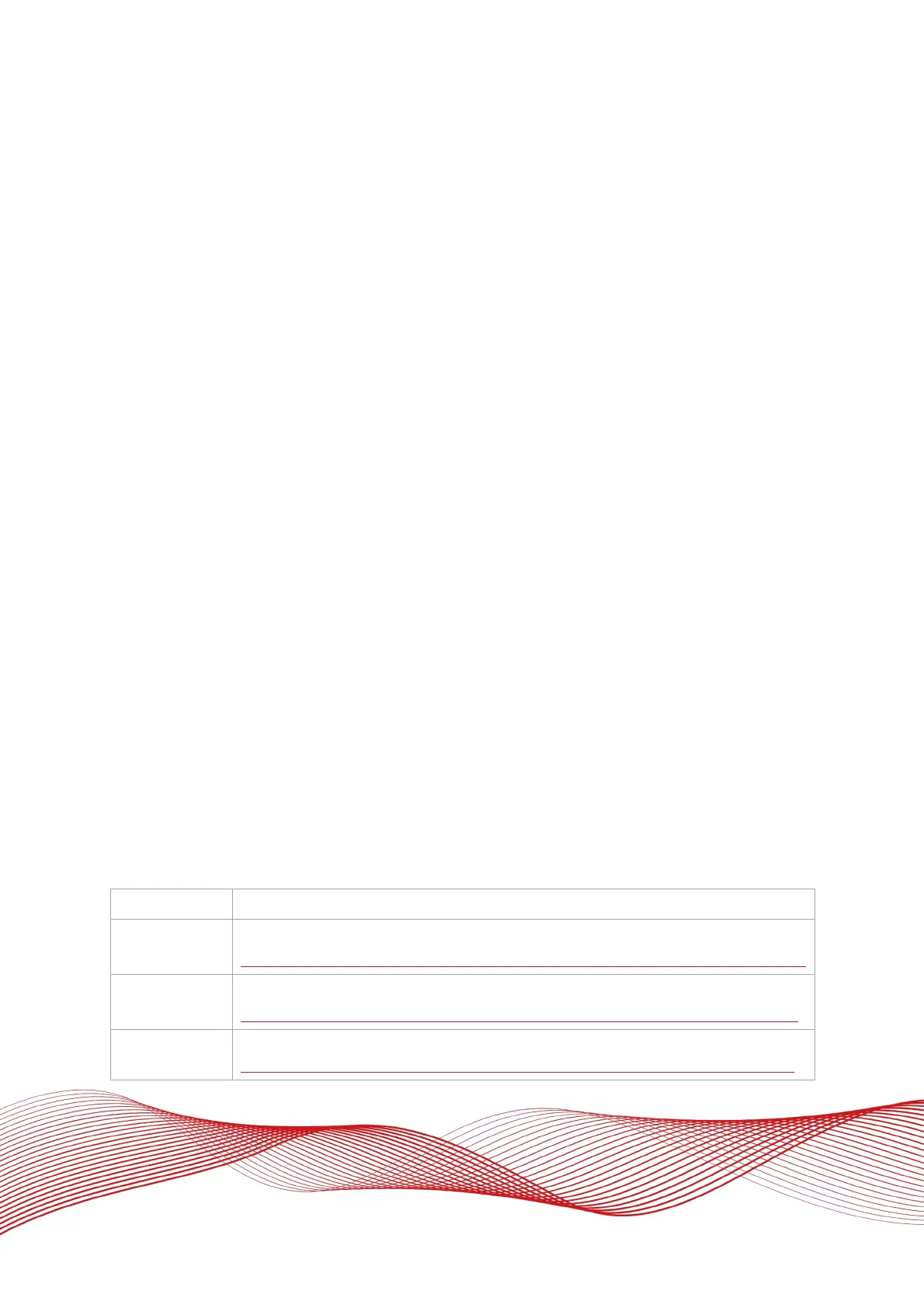
Table 1: Supplementary manuals
NAVdisplay
Manual
For viewing real-time information from an RT.
https://www.oxts.com/software/navsuite/documentation/manuals/NAVdisplay_man.pdf
NAVgraph
Manual
For plotting and exporting captured data.
https://www.oxts.com/software/navsuite/documentation/manuals/NAVgraph_man.pdf
NAVsolve
Manual
Explains how to use our post-processing application.
https://www.oxts.com/software/navsuite/documentation/manuals/NAVsolve_man.pdf