Oxford Technical Solutions Ltd Page 54 of 110
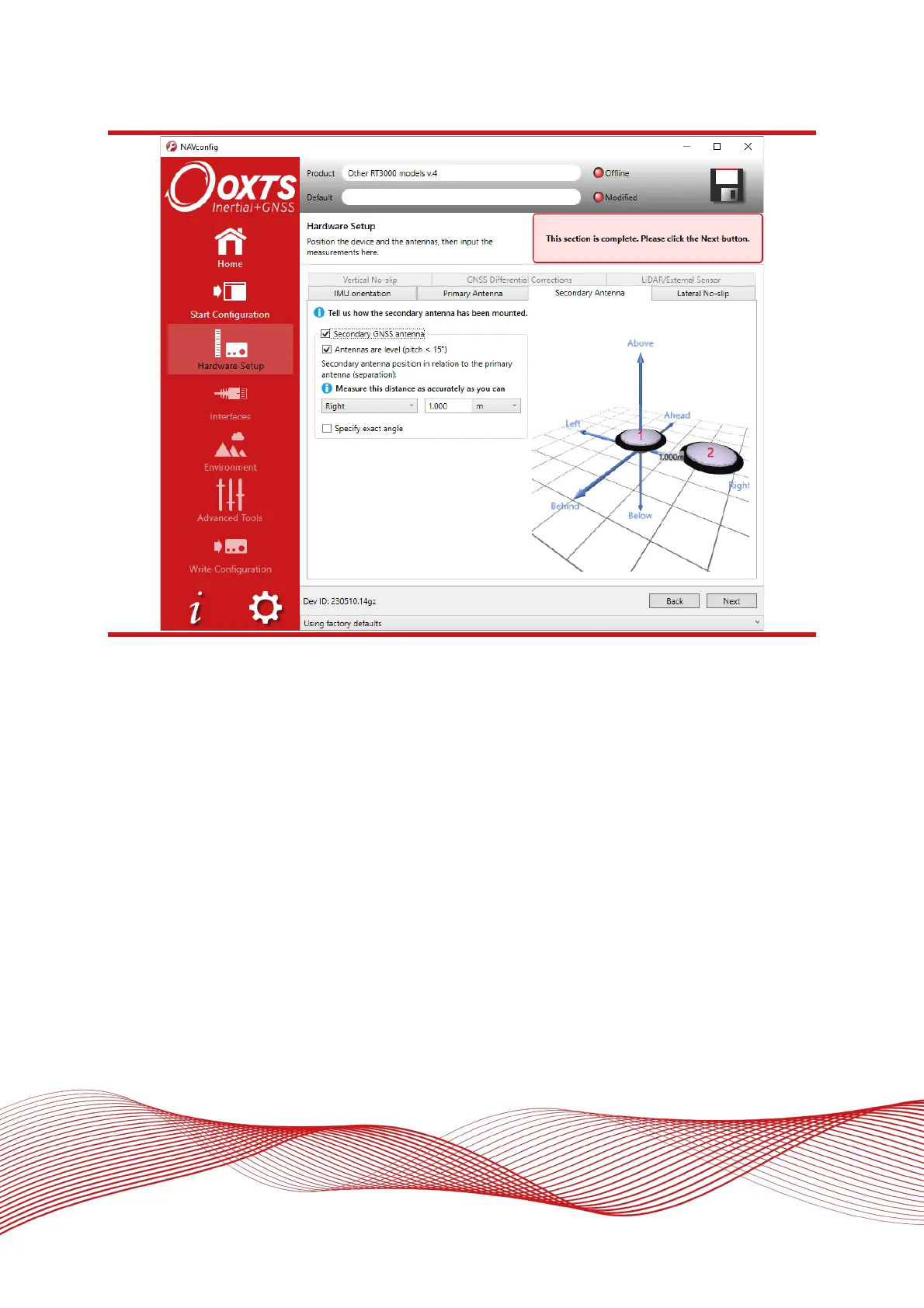
Figure 25: NAVconfig Secondary Antenna tab in the Hardware Setup section
The RT does not estimate the distance between the two antennas. It is essential to get this right yourself,
otherwise the system will not work correctly and the performance will be erratic. The measurement needs to
be accurate to 5 mm, preferably better than 3 mm.
A wider separation will increase the dual antenna heading solution accuracy. The maximum recommended
separation is 5 m, giving an accuracy of up to 0.05° in both static and dynamic conditions.
If the antennas are mounted at significantly different heights, or if the mounting angle is not directly along a
vehicle axis (forward or right), then click the ‘Use advanced settings’ checkbox to enable advanced settings
and specify the orientation and height offset.
Getting the angle wrong by more than 3° can lead the RT to lock on to the wrong heading solution. The
performance will degrade or be erratic if this happens. If the angle between the antennas cannot be estimated
within a 3° tolerance then contact OxTS support for techniques for identifying the angle of the antennas.
The ‘Enable static initialisation’ option is useful for slow moving vehicles or where it is essential to start the RT
running before moving (for example in autonomous vehicles). Static initialisation is 99% reliable in open sky,
but the reliability decreases in environments with high multipath. Static initialisation is also faster when the
antenna separation is smaller. This can be configured in the Environment section.