Oxford Technical Solutions Ltd Page 72 of 110
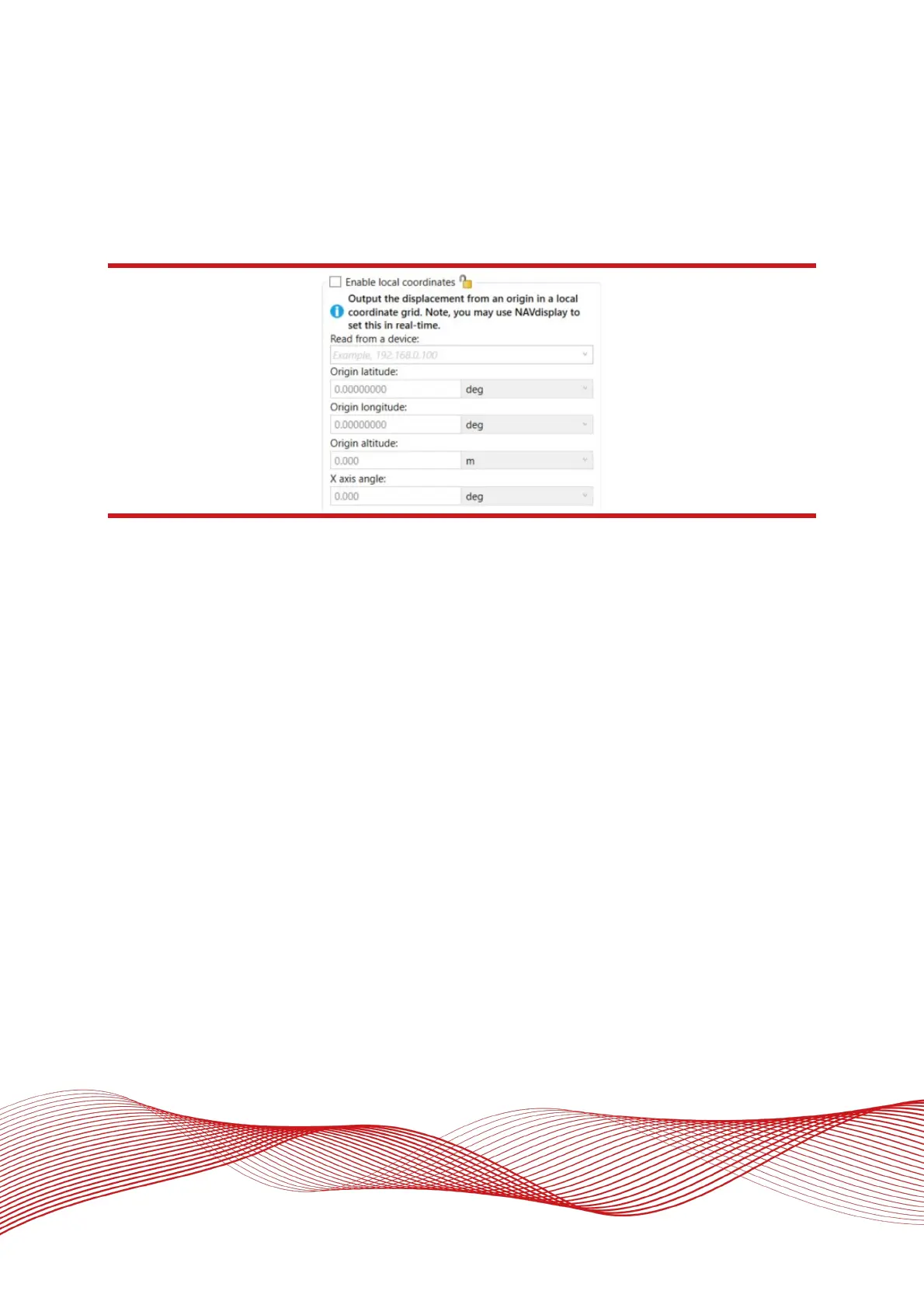
Enable local coordinates
The RT can output the displacement from an origin in a local co-ordinate grid. To use this option a “zero”
location or origin must be chosen; the latitude, longitude and altitude for the origin must be entered into the
RT. If an RT-Base S is available, then these will be shown on the LCD. A rotation can also be specified to rotate
the xy directions.
Figure 36: NAVconfig enable local co-ordinates in the environment section
Advanced Tools section
This section contains several settings for Advanced users. By default, these settings are not switched on so
you should navigate through the various tabs to review the settings that apply to your application.
Displace Output tab
The RT can displace or move its outputs to another location in the vehicle. This simulates the RT being mounted
at the new location, rather than at its actual location. This function displaces all of the outputs (position,
velocity, acceleration) to this new location.
To enable output displacement, click the checkbox and enter the offsets to the new location in the vehicle. The
offsets are measured from the RT in the vehicle co-ordinate frame. Select the directions from the dropdown
lists and input the distances.
Note that the noise in the acceleration outputs will be much higher when output displacement is used. Typical
installations in moving vehicles have angular vibrations of about 2 rad/s²; this equates to 2 m/s² of additional
vibration of a 1 m output displacement. It will be necessary to filter the data if output displacement is used.
Acceleration filters tab
The RT is able to filter the linear acceleration and the angular acceleration before they are output. These filters
affect the outputs on the CAN bus. On the NCOM output the non-filtered values are output together with the
filter characteristics and the NCOM decoders provided by OxTS will implement the chosen filter. The linear
acceleration and the angular acceleration can be configured separately.