PreciseFlex_Robot
94
Calibrating the Robot), or another known position, and check the joint angles in the Virtual
Pendant in the Web Operator Interface. The joint angles in the Calibration Position are:
Z Axis: -1mm (-2mm for Beta robots)
J2 or Shoulder: -90
J3 or Elbow: 179.99
J4 or Wrist: -180
If the robot joints after this procedure followed by homing are different from the above, then the
robot needs to be re-calibrated. See procedure below.
Replacing the Encoder Battery
DANGER: Before replacing the encoder battery, the AC power should be
disconnected. Removing the front cover allows access to the AC power
terminals.
The Encoder Battery is designed to last for several years with robot power turned off. With robot power
turned on, there is no drain on the battery. The battery voltage is monitored by the system. The nominal
battery voltage is 3.6 volts. If the battery voltage drops to 3.3 volts an error message “Encoder Battery
Low” is generated. At this level the absolute encoder backup function will still work, however the Battery
should be replaced. If the voltage drops to 2.5 volts, an error message “Absolute Encoder Down” is
generated. At this point, the absolute encoder backup function will not work.
Note that if any motor/encoder is disconnected from the encoder battery by disconnecting the encoder
cable, the “Encoder Battery Low” or Encoder Battery Down” message will be generated. However in this
case the encoder battery does not need to be replaced. It is only necessary to re-calibrate the robot, see
below.
Tools Required:
1. 3.0mm hex driver or hex L wrench
Parts Required:
1. New Encoder Battery PN PF00-EA-00002
2. 6 in long by .125 wide tie wrap
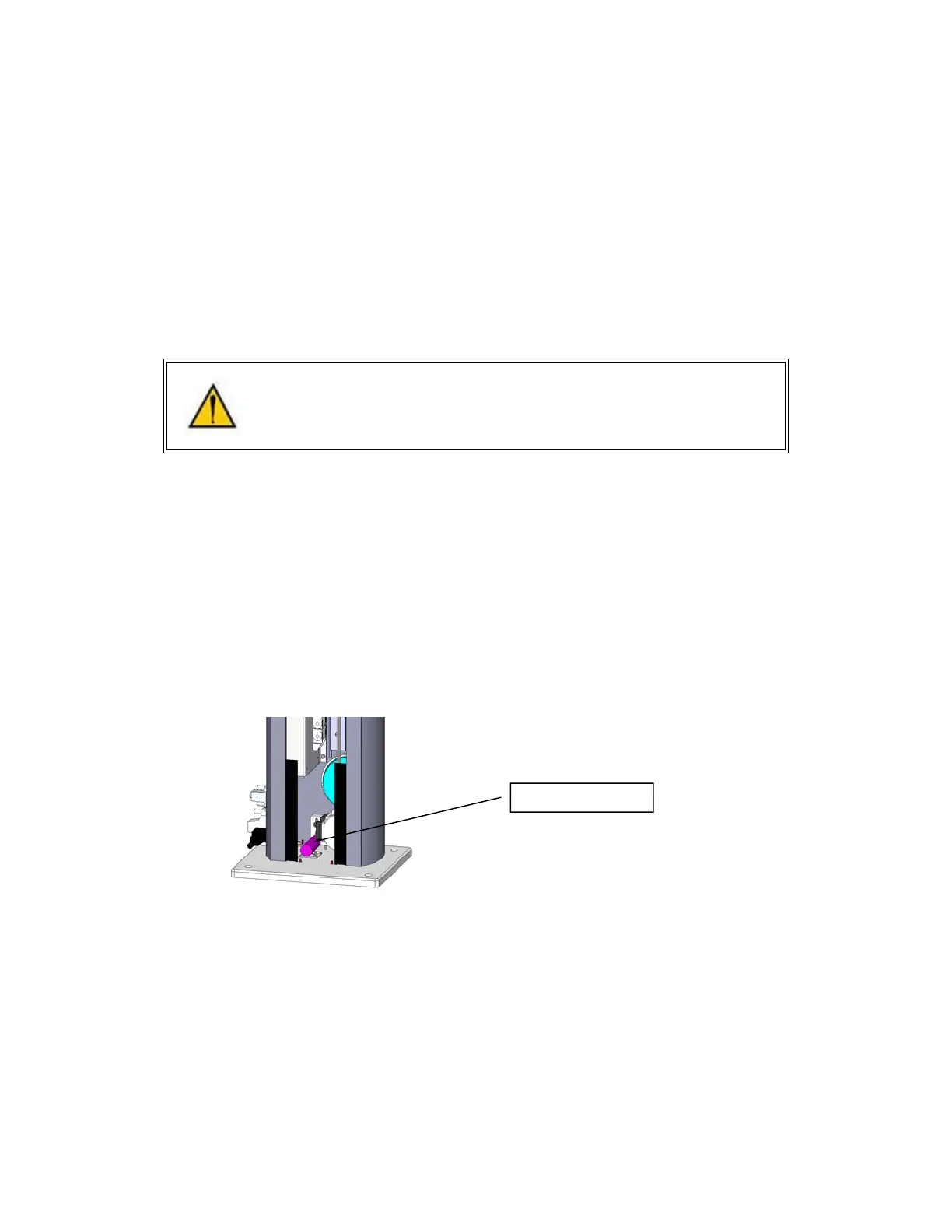
Encoder Batter