Introduction to the Hardware
3
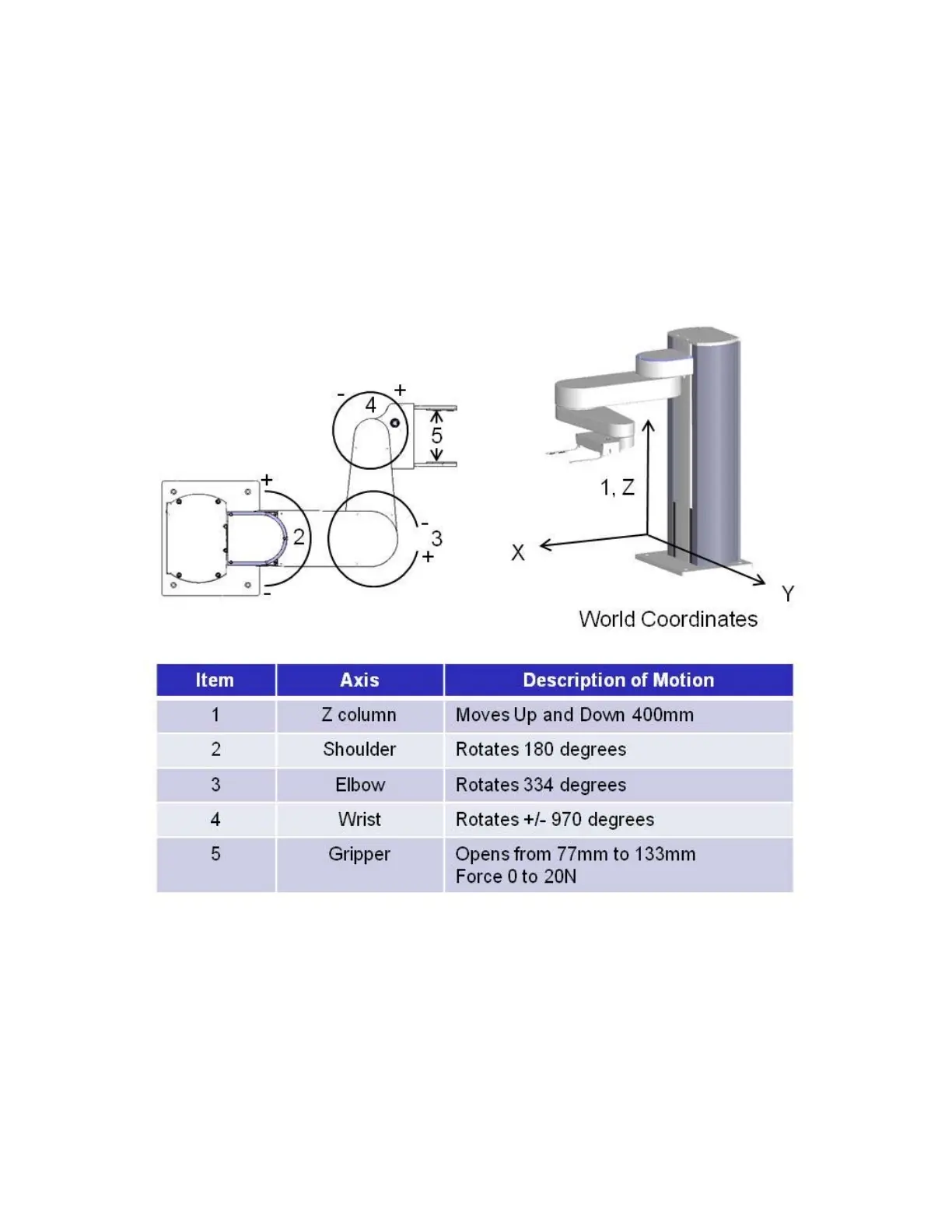
System Diagram and Coordinate Systems
The major elements of the PreciseFlex robot and the orientation and origin of its World Cartesian
coordinate system are shown in the diagram below.
The first axis of the robot, J1, moves the robot arm up along the Z Column, which is the Z-axis. When
inner link is closest to the bottom, the Z-axis is at its 0 position in the Joint Coordinate system and
Z=30mm in the World Coordinate system. As the robot arm moves upwards, both its joint position and the
World Z Coordinate increase in value.
The Z column also contains the 24VDC and 48VDC power supplies and the connector panel. The
Guidance controller is located inside the inner link of the robot, and the gripper controller is located inside
the outer link.