PreciseFlex_Robot
132
7. Remove the Harness Retaining Clip from the Robot Controller Mount Plate to release the
controller end of the harness.
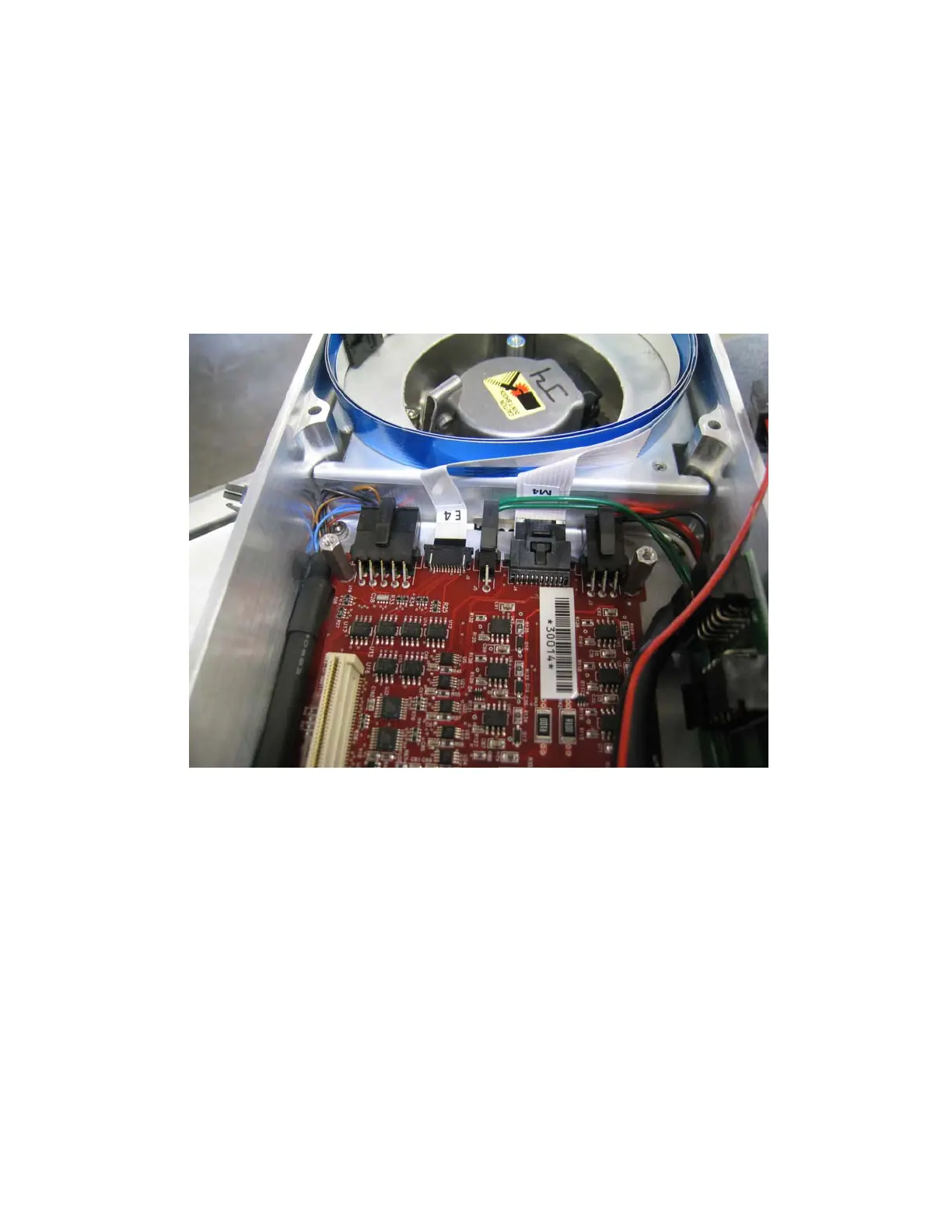
8. Remove the 4 M2.5 X 16mm standoffs attaching the lower circuit board in the Robot Controller.
Gently tip the lower circuit board upwards and disconnect the motor and encoder cables from the
lower circuit board.
9. Release the Harness Retaining Clip from the J3 Output Pulley by loosening the M3 by 25 SHCS
attaching the clip to the pulley. Pull the clip upwards and remove the M3 X 4 BHCS that clamps
the harness to release the harness from the clip.
10. Replicate the folds on the controller end of the replacement harness.
11. Insert the replacement harness into the Robot Controller circuit boards and reattach the Robot
Controller circuit boards.