When setting up an EtherCAT network with MEP cards, it should be
ensured that
● Ethernet port 1 is used as Input ("IN")
● Ethernet port 2 is used as Output ("OUT")
8.2.4 Process Data
The process data can be configured by writing CAN object indexes to the follow-
ing lists:
● Producer data list [0x1A15]
● Consumer data list [0x1615]
Only the asynchronous transmission type “Free Run Mode” is sup-
ported.
8.3 Acyclic Communication
With supporting of CAN over Ethernet (CoE), all function code parameters of the
EFC series frequency converter can be read, and if permitted can be written, di-
rectly by SDO.
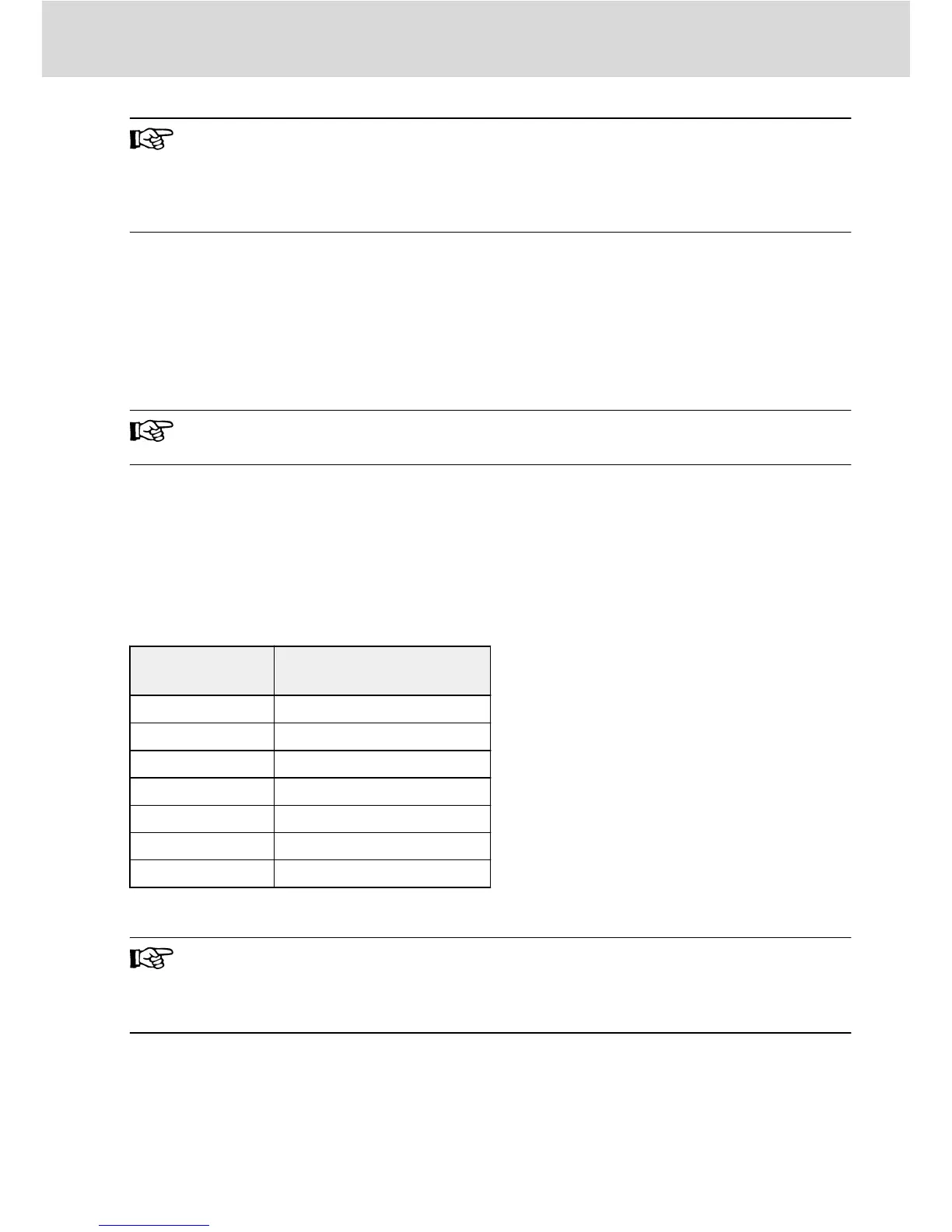
Table below shows the CAN indexes corresponding to the function code parame-
ters.
Function Code
Range
CAN Index Range
b0.00...b9.99 0x2000...0x23E7
d0.00...d9.99 0x23E8...0x27CF
C0.00...C9.99 0x27D0...0x2BB7
E0.00...E9.99 0x27B8...0x2F9F
U0.00...U9.99 0x2FA0...0x3387
F0.00 ...F9.99 0x3388...0x376F
H0.00...H9.99 0x3770...0x3B57
Tab. 8-2: CAN indexes corresponding to the function code parameters
When parameter write access on the two bytes type parameter, any
values exceed 65,535 (0xFFFF) will be reduced automatically to a
two bytes value. If the reduced two bytes value is in the valid range,
then it will be accepted and without value exceed limits indication.
Multi-Ethernet Card Bosch Rexroth AG
EtherCAT
DOK-RCON0*-XFCX610*MUL-IT02-EN-P
45/61
 Loading...
Loading...


