User Manual Bearing System RT-300
Issue: 2017/06/27 [Rev 1.04.c] Page 54 of 79 12-9-1-0013-9-2-0001-3-1-60
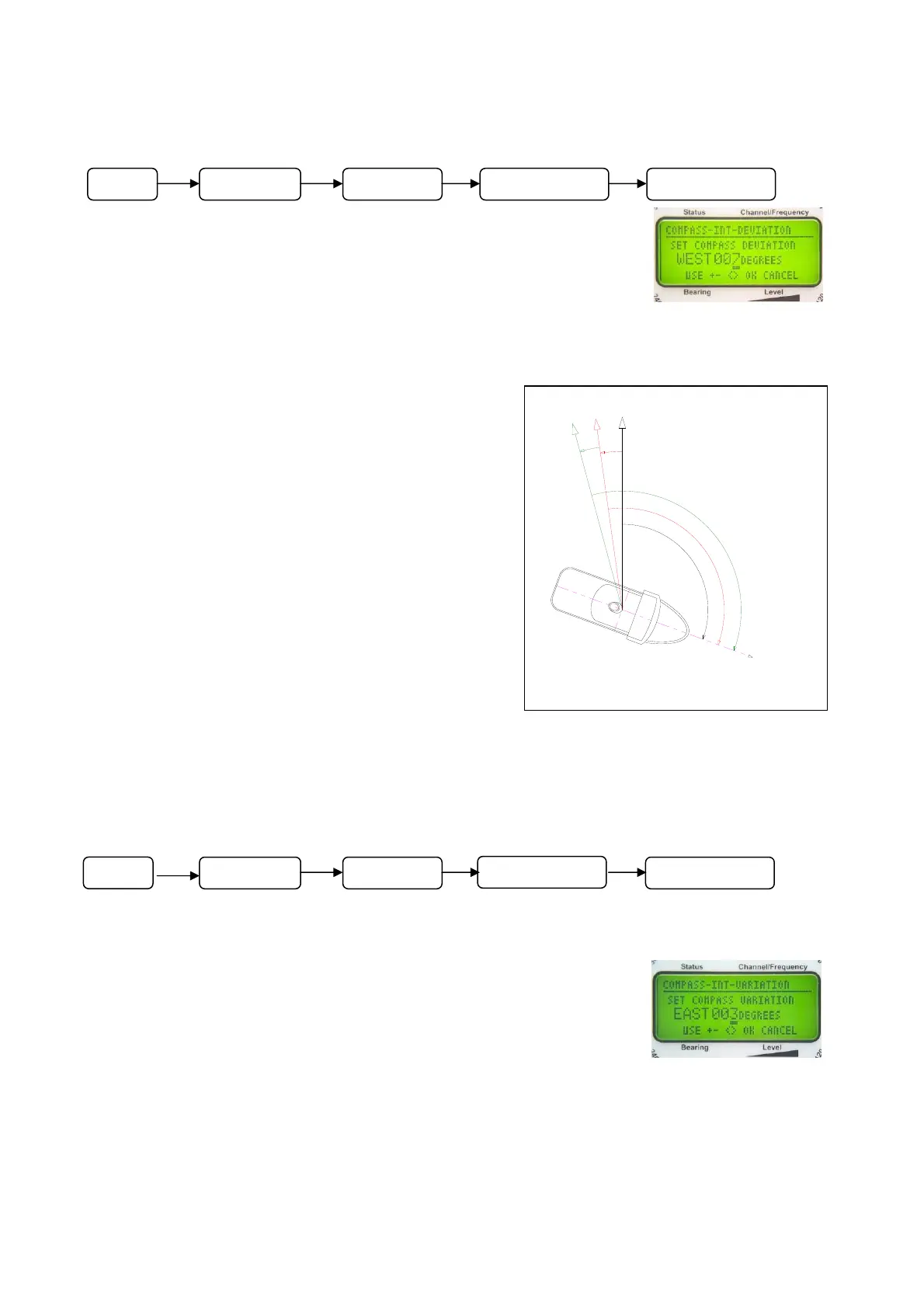
6.2.1.5.4.5.2 Input of Compass Error – Deviation: INT. COMPASS DEVIATION
Deviation is the difference of angle between the actual magnetic
north direction and the north direction determined by the internal
compass. Usually, the deviation may differ for each compass
value. If the calibration was done properly, these differences have
been eliminated largely. If a constant aberration is appearing, it
can be compensated by the input of a correcting value.
Example:
- The magnetic heading (MH) of the vessel is 118°
(indicated on the vessel´s compass).
- The compass heading (CH), put out by the
compass module of the bearing system, is 125°.
- The difference between CH and MH is equal 7°
that means a deviation of 7°.
- For the compass heading is greater than the
magnetic heading, the direction of the deviation is
“WEST“ (the deviation is ”EAST“ if the compass
heading is smaller than the direction of the
deviation).
- The value to be put in in our example therefore is
„WEST 007“.
NOTE
The present compass data can be displayed in submenu SERVICE - COMPASS (see
6.2.1.6.4).
6.2.1.5.4.5.3 Input Magnetic Variation: INT. COMPASS VARIATION
If the compass module shall be used as a source for geographic north, the local magnetic
variation has to be put in.
Variation is the difference between geographic and magnetic north
(see Fig. 80). Magnetic variation is depending on the location on
earth and to be taken from corresponding charts.
Fig. 79
C
N
M
N
D
E
V
V
AR
7
°
W
8
°
W
C
H
M
H
T
H
H
e
a
d
i
n
g
TN = true north
MN = magnetic north
CN = compass north
TH = true heading
MH = magnetic heading
CH = compass heading
TN
=
1
2
5
°
=
1
1
8
°
=
1
1
0
°
Fig. 80
Fig. 81
M
n
SETUP COMPASS INT. COMPASS DEVIATION
SETUP COMPASS
INT. COMPASS
VARIATION
M
n