AX10 Palletizing Solution
3.5. Other Grippers
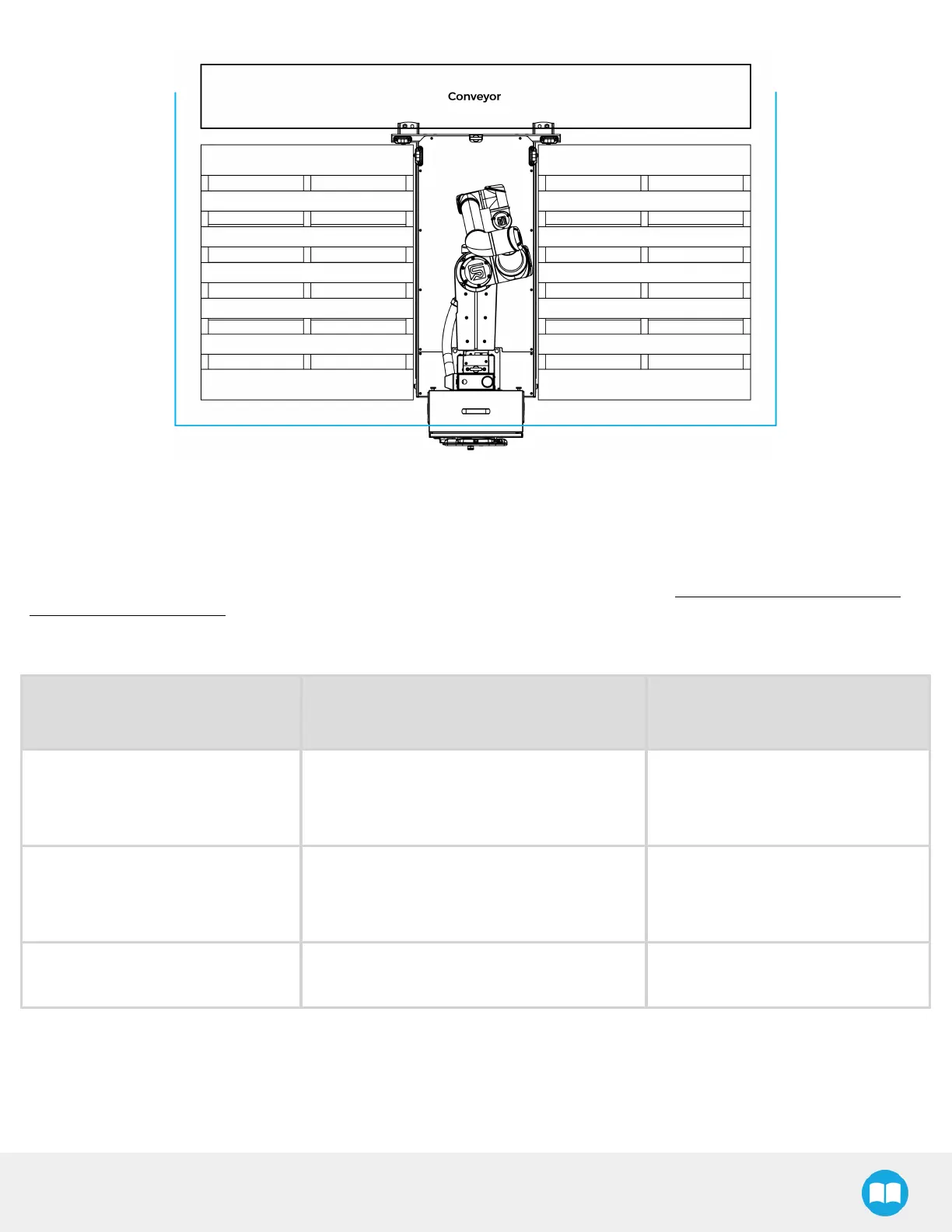
It is possible to use a gripper other than the PowerPick10 Vacuum Gripper. If another gripper is used, it is important to validate
that its shape is within the gripper model used for the collision detection algorithm of the software. If the shape of the alternative
gripper does not correspond with the shape of the following models, it might function as well, but Robotiq does not guarantee
that there will be no collision.
The dimensions of the gripper model depends on the dimensions of the box to palletize and are obtained using the following
criteria:
Box Footprint
(A
box
X B
box
)
Gripper Footprint
(A
g
X B
g
)
Gripper Height
(C
g
)
A
box
< 105 mm
OR
B
box
< 55 mm
A
g
= A
box
- 1 mm
B
g
= B
box
- 1 mm
110 mm
A
box
> 450 mm
OR
B
box
> 350 mm
A
g
= A
box
- 40 mm
B
g
= B
box
- 40 mm
55 mm
Otherwise
A
g
= 200 mm
B
g
= 130 mm
110 mm
65