AX10 Palletizing Solution
6.3. Connections
6.3.1. Safety Devices Using OSSDContacts
CAUTION
Shut down the robot and power off the linear axis controller before making inter-controller and
safety signal connections.
1. Open the linear axis controller.
2. Run the safety device cable inside via the cable gland under the controller.
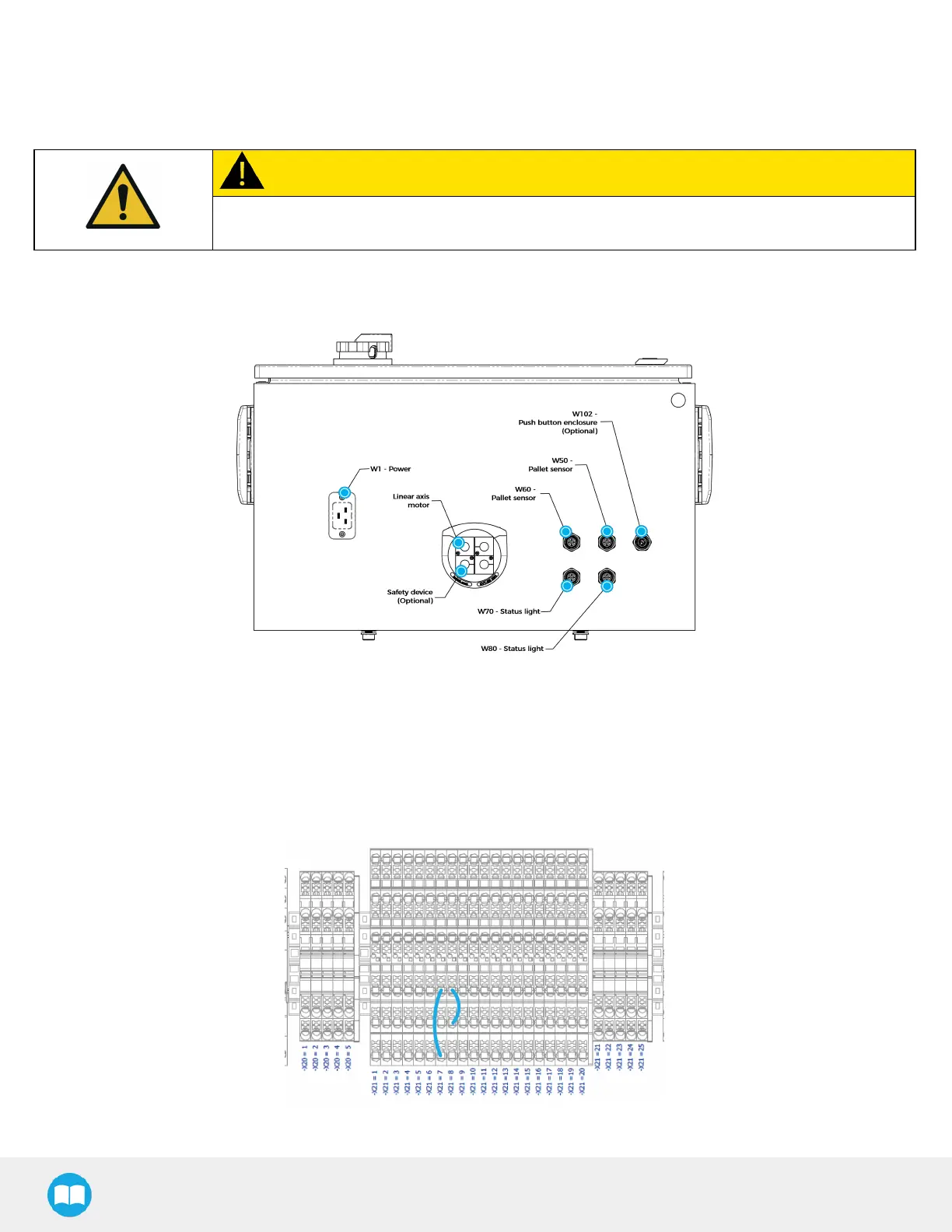
Fig. 6-5: Linear Axis Controller Connections
3. On terminal bank -X21, locate the two (2) jumpers that correspond to one of the safety options.
a. In this example, the first jumper goes from -X21.7.1 to -X21.7.3. The 7
th
terminal block (IN7) is allocated to Safety
Scanner_1 (1).
b. In this example, the second jumper goes from -X21.8.2 to -X21.8.3. The 8
th
terminal block (IN8) is allocated to
SafetyScanner_1 (2).
Fig. 6-6: Example of Jumper Connections