Robotiq Screwdriving Solution - Instruction Manual
Fig. 1-7: Max Line of the Screw Chamber.
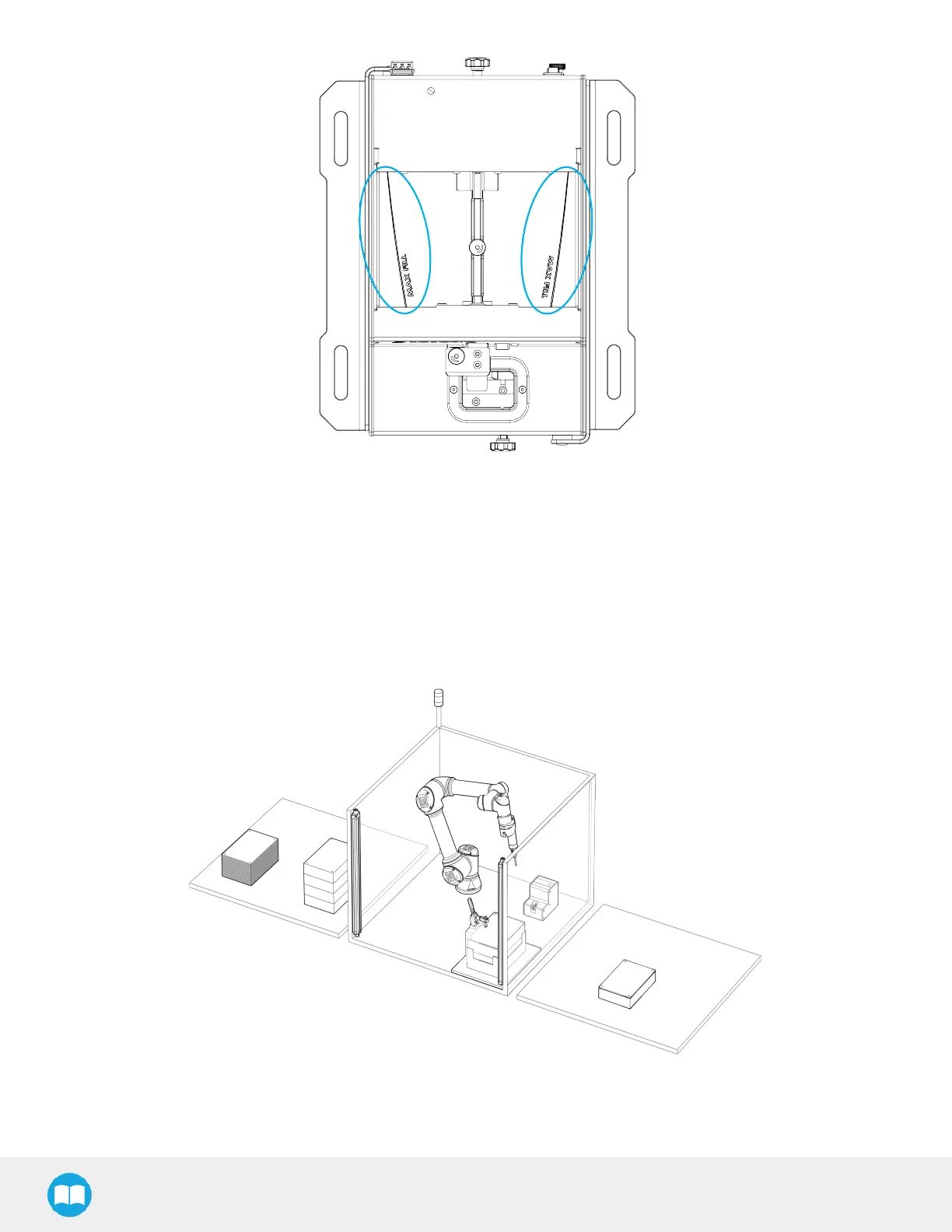
1.3.Screw Picking and Fastening
In a typical screwdriving application, the Robotiq Screwdriver collects, via vacuum action, a screw dispensed by the Robotiq Screw
Feeder. The robot arm then movesto the workpiece within reach and executes a screwdriving action based on the parameters set
by the user in the software interface.
Fig. 1-8: Typical Screwdriving Cell with the Robotiq Screwdriver and Screw Feeder.
11