362
Manual – IPOSplus®
24
"Hoist" sample program
Assembler – Examples
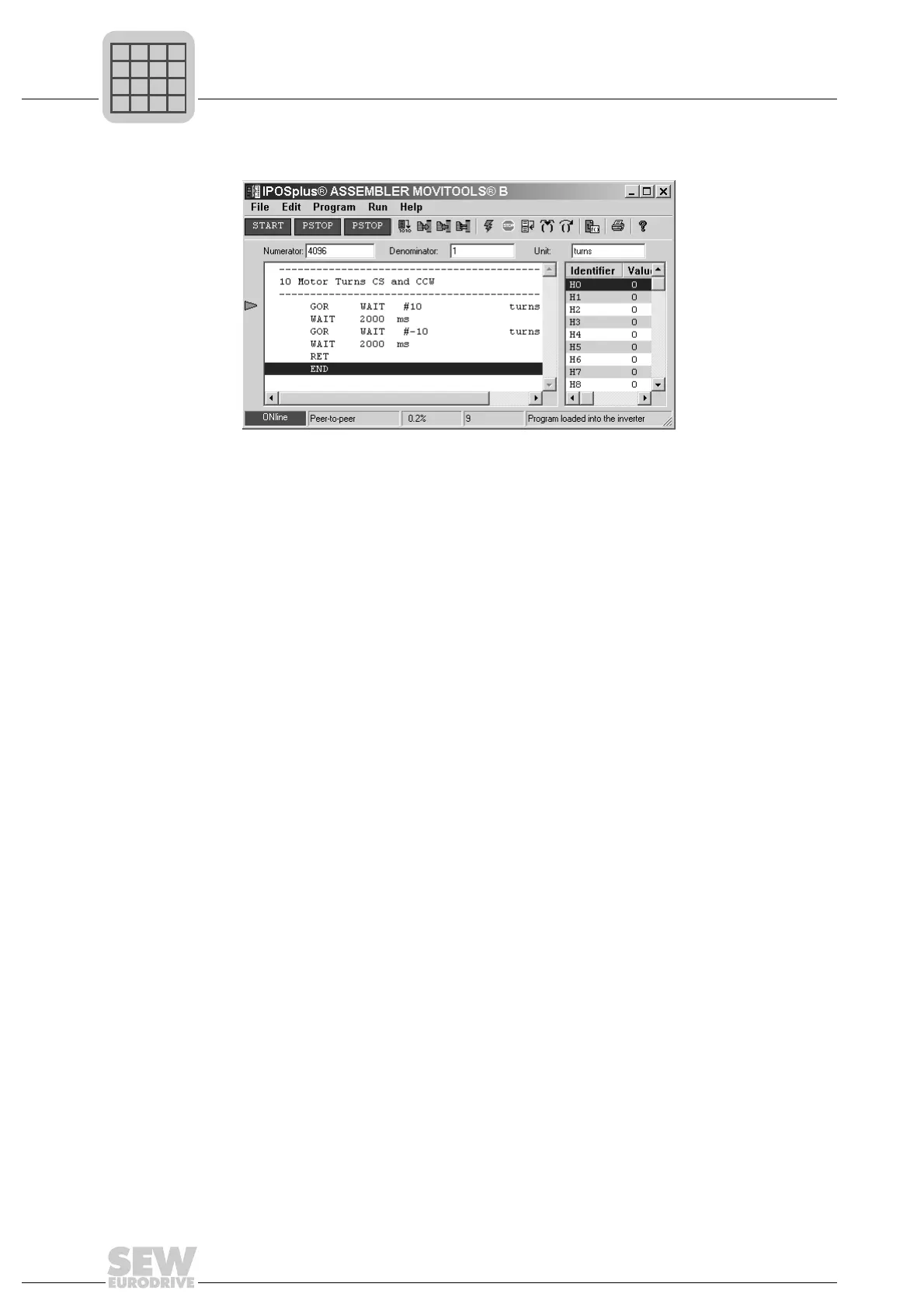
"10 motor revolutions back and forth" sample program:
The RET command is not mandatory in this example as the program was not called as
a subroutine. The return command causes the program to jump back to the first program
line, which is permitted in this case.
24.2 "Hoist" sample program
24.2.1 Characteristics
• Reference travel
• Selection of three hoist positions via binary inputs
• Notification when a selected position is reached
• Automatic movement away from hardware limit switches
The first 3 input terminals of the DIO11B option allow for 3 positions to be approached.
The drive is moved away from a hardware limit switch by entering a "1" signal at the
"RESET" input (DI02).
24.2.2 Settings
A detailed description of the configuration of inputs/outputs is available in the remark
section of the program source code.
516923787
The program consists of:
3 remark lines
Travel relative 10 motor revolutions CW
Wait 2 seconds
Travel relative 10 motor revolutions CCW
Wait 2 seconds
End program
End of program / jump to start of program