54
Manual – IPOSplus®
6
Motor encoder (X15)
Position Detection and Positioning
The position values are always available for IPOS
plus®
control in the variables H509 to
H511. Even if positioning was performed without IPOS
plus®
, impulse encoders con-
nected to X14 and X15 can be recorded and further processed in the IPOS
plus®
pro-
gram. The system variables H570 ... H573 can be used to activate zero pulse counters
for motor encoder X15 and external encoder X14 in order to record the number of zero
pulses. A motor encoder must be used for positioning with the IPOS
plus®
commands
(GO...). The motor encoder supplies MOVIDRIVE
®
with a high-quality speed signal.
6.2 Motor encoder (X15)
You can only use the IPOS
plus®
positioning control when a motor encoder is connected
to X15 and an operating mode ".. & IPOS" is set in P700 Operating mode 1. P941
Source actual position determines which position measurement is used for positioning.
The travel commands of IPOS
plus®
control (GO commands) refer to the position infor-
mation of the encoder entered in P941 Source actual position.
6.3 Encoder combinations
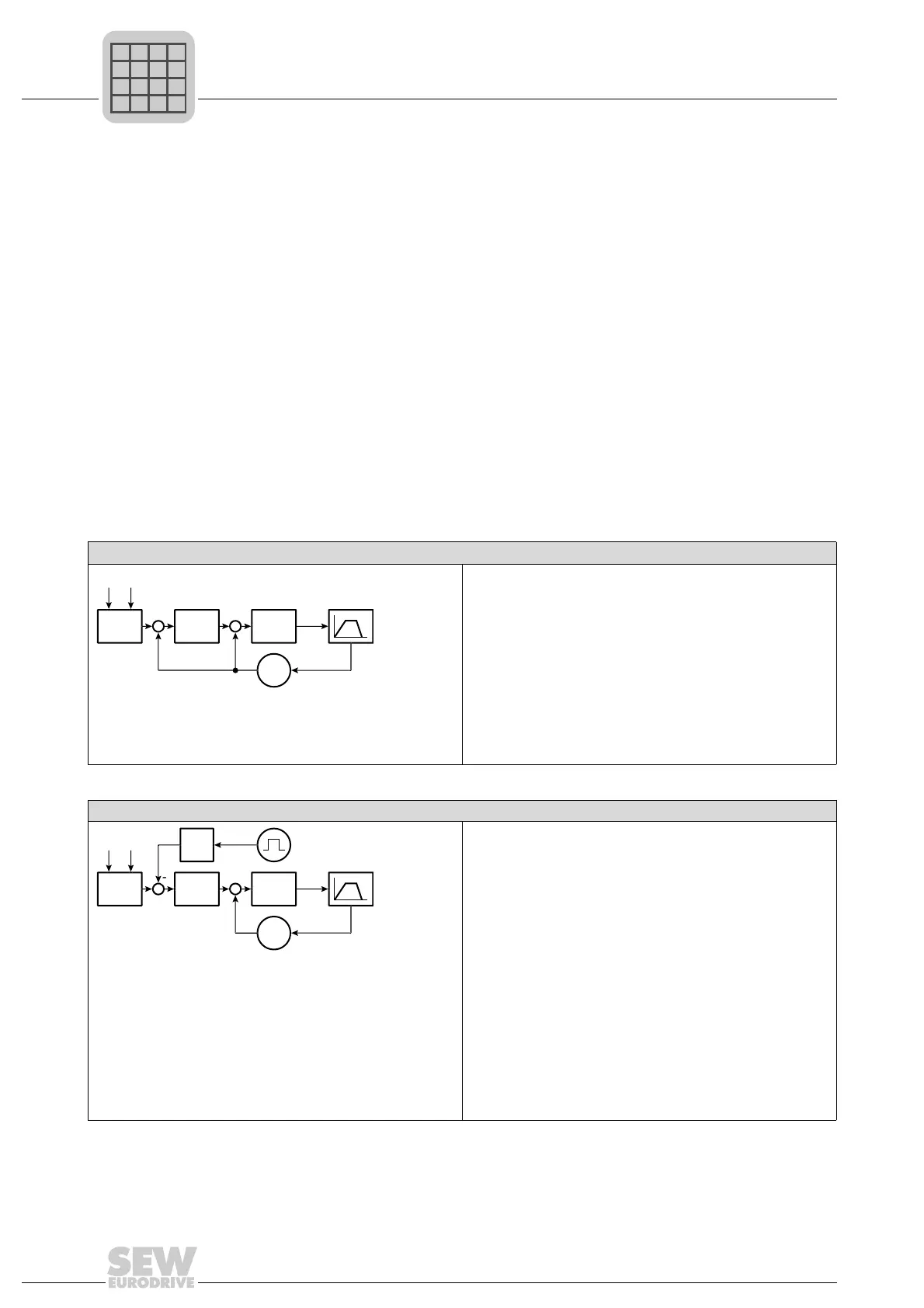
Direct position control with motor encoder
474539019
• An incremental encoder / resolver / Hiperface
®
encoder (X15)
must be installed on the motor.
•In IPOS
plus®
, positioning commands, for example, "GOA ..."
are performed with reference to the actual source position
(here, motor encoder X15).
v
max
= maximum speed
a
max
= maximum acceleration
PG = Profile generator
P
act
= Actual position of the motor encoder
PC = Position controller
n
act
= Actual speed
nC = Speed controller
v
max
a
max
PG PC nC
P
act
n
act
M
+
+
-
-
Direct speed control with external encoder and motor encoder
474540555
• An incremental encoder / resolver / Hiperface
®
encoder (X15)
is always required on the motor for speed feedback.
• Slip or mechanical play (gear unit backlash) between the
motor encoder and the external encoder is compensated
automatically.
•In IPOS
plus®
, positioning commands, for example, "GOA ..."
are performed with reference to P941 actual source position
(here, external encoder X14).
• The dynamic response that can be achieved depends on the
properties and the mechanical installation of the external
encoder as well as the position resolution.
• see section "IPOS
plus®
with Options" / "External encoder"
v
max
= maximum speed
a
max
= maximum acceleration
PG = Profile generator
PC = Position controller
n
act
= Actual speed
nC = Speed controller
EXT = external encoder
 Loading...
Loading...