Manual – IPOSplus®
55
6
Encoder combinations
Position Detection and Positioning
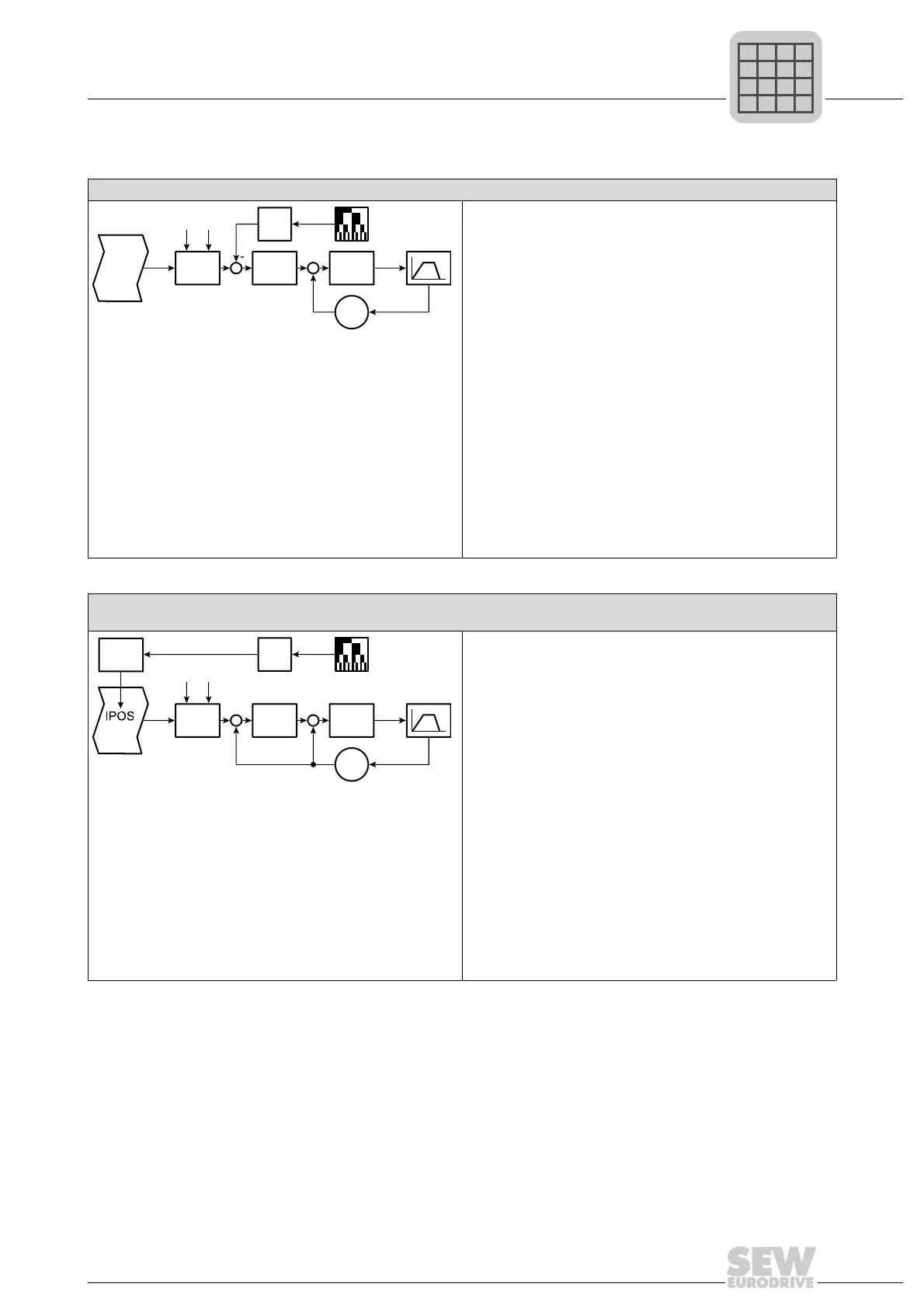
Direct position control with absolute encoder and motor encoder
474542091
• Direct position control in IPOS
plus®
by means of the SSI
absolute encoder connected via DIP11.
• An incremental encoder / resolver / Hiperface
®
(X15) is
always required on the motor for speed feedback.
• Slip or mechanical play (gear unit backlash) between the
incremental encoder /resolver / Hiperface
®
of the motor and
the absolute encoder is compensated automatically.
•In IPOS
plus®
, positioning commands, for example, "GOA ..."
are performed with reference to the actual source position
(here, absolute encoder DIP).
• The dynamic response that can be achieved depends on the
properties and the installation of the absolute encoder as well
as the position resolution.
• refer to the manual "Positioning with Absolute Encoder
DIP11A"
v
max
= maximum speed
a
max
= maximum acceleration
PG = Profile generator
PC = Position controller
n
act
= Actual speed
nC = Speed controller
ABS = absolute encoder
IPOS = IPOS
plus®
program
Position control with incremental encoder on the motor,
Processing the absolute encoder position in the IPOS
plus®
program
474543627
• Position control is performed in IPOS
plus®
using the motor
encoder connected to X15.
• An incremental encoder / resolver is always required on the
motor for speed feedback.
• The high dynamic response of the inverter can be used
directly for positioning.
• The position information of the absolute encoder is mapped
automatically in an IPOS
plus®
variable and can be processed
using program control.
• Using the DIP11 in this way means that reference travel is
unnecessary.
• refer to the manual "Positioning with Absolute Encoder DIP11"
v
max
= maximum speed
a
max
= maximum acceleration
PG = Profile generator
P
act
= Actual position of the motor encoder
PC = Position controller
n
act
= Actual speed
nC = Speed controller
ABS = absolute encoder
SV = System variable
IPOS = IPOS
plus®
program
v
max
a
max
PG PC nC
n
act
M
+
+
-
DIP ABS
P
act
-
SV
 Loading...
Loading...