56
Manual – IPOSplus®
6
Encoder combinations
Position Detection and Positioning
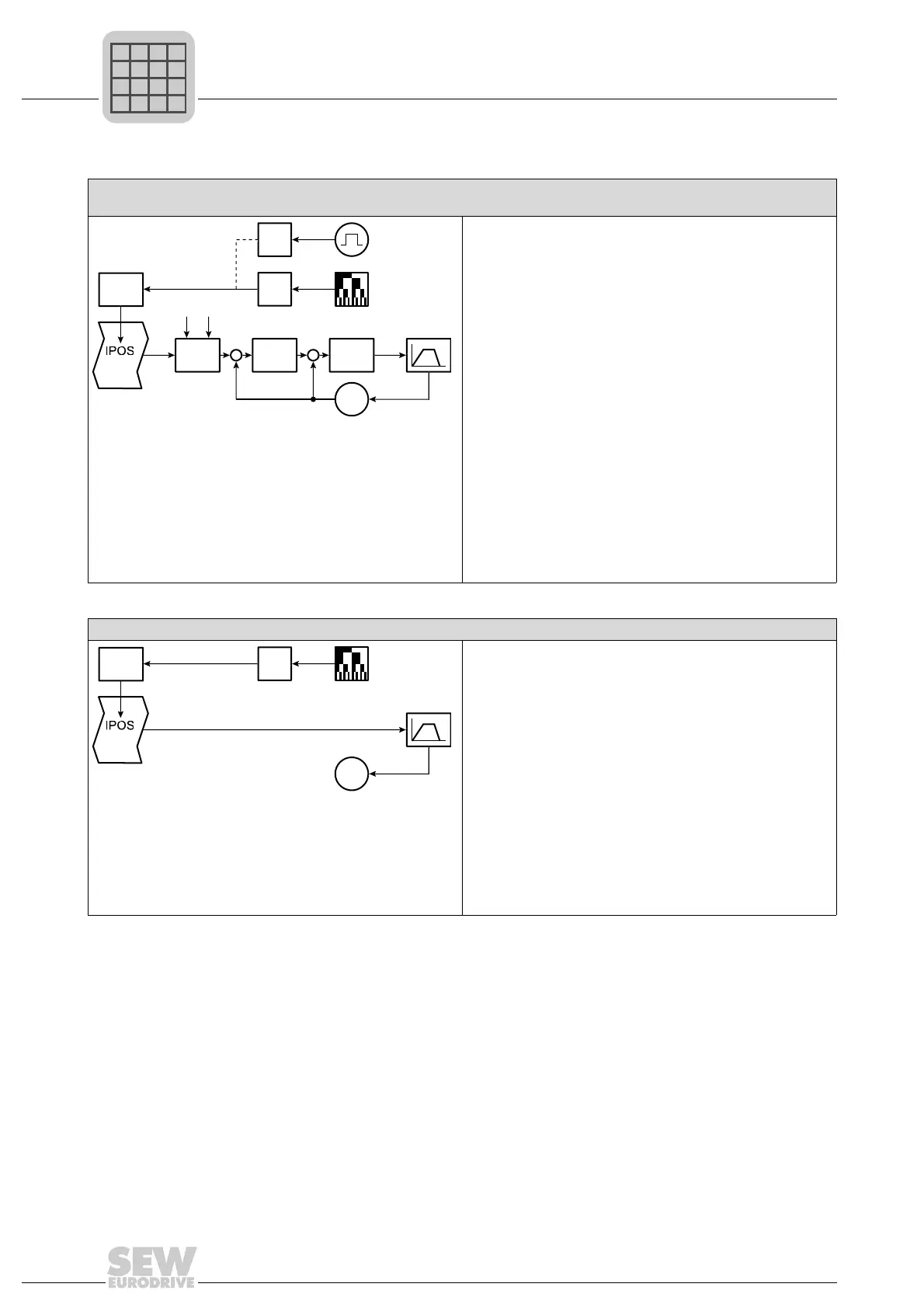
Position control with motor encoder,
Processing the second encoder in the IPOS
plus®
program as master encoder
474583563
• Position control is performed in IPOS
plus®
using the motor
encoder connected to X15.
• An encoder is always required on the motor for speed
feedback.
• The high dynamic response of the inverter can be used
directly for positioning.
• The position information of the second encoder is mapped
automatically in an IPOS
plus®
variable and can be processed
using program control.
• This design is used when the inverter runs in relation to a
second encoder (for example, synchronous angel or
electronic cam)
v
max
= maximum speed
a
max
= maximum acceleration
PG = Profile generator
P
act
= Actual position of the motor encoder
PC = Position controller
n
act
= Actual speed
nC = Speed controller
ABS = absolute encoder
EXT = external encoder
SV = System variable
IPOS = IPOS
plus®
program
v
max
a
max
PG PC nC
n
act
M
+
+
-
DIP ABS
P
act
-
SV
Processing the absolute encoder position in the IPOS
plus®
program
474585099
• The position information of the absolute encoder is mapped
automatically in an IPOS
plus®
variable and can be processed
using program control.
• The DIP11 or a HIPERFACE
®
encoder on X14 can be used in
particular to replace applications in which positioning usually
takes place using rapid speed/creep speed by means of
several proximity switches.
• An incremental encoder^/resolver on the motor for speed
feedback is not required, you can use a standard
asynchronous motor. The operating mode "... & IPOS" is not
required.
• Refer to the manual "Positioning with Absolute Encoder
DIP11" The application module "Absolute positioning" is
available in SHELL to perform this type of positioning task.
ABS = absolute encoder
SV = System variable
IPOS = IPOS
plus®
program
n
thres
= Setpoint speed
 Loading...
Loading...