6
Frames 12.98
6.9 NCU-
lobal frames
SW 5 and hi
her
6
840D
NCU 571
840D
NCU 572
NCU 573
FM-NC 810D 840Di
Siemens AG 2000. All rights reserved
6-216
SINUMERIK 840D/840Di/810D/FM-NC Programming Guide Advanced (PGA)
−
04.00 Edition
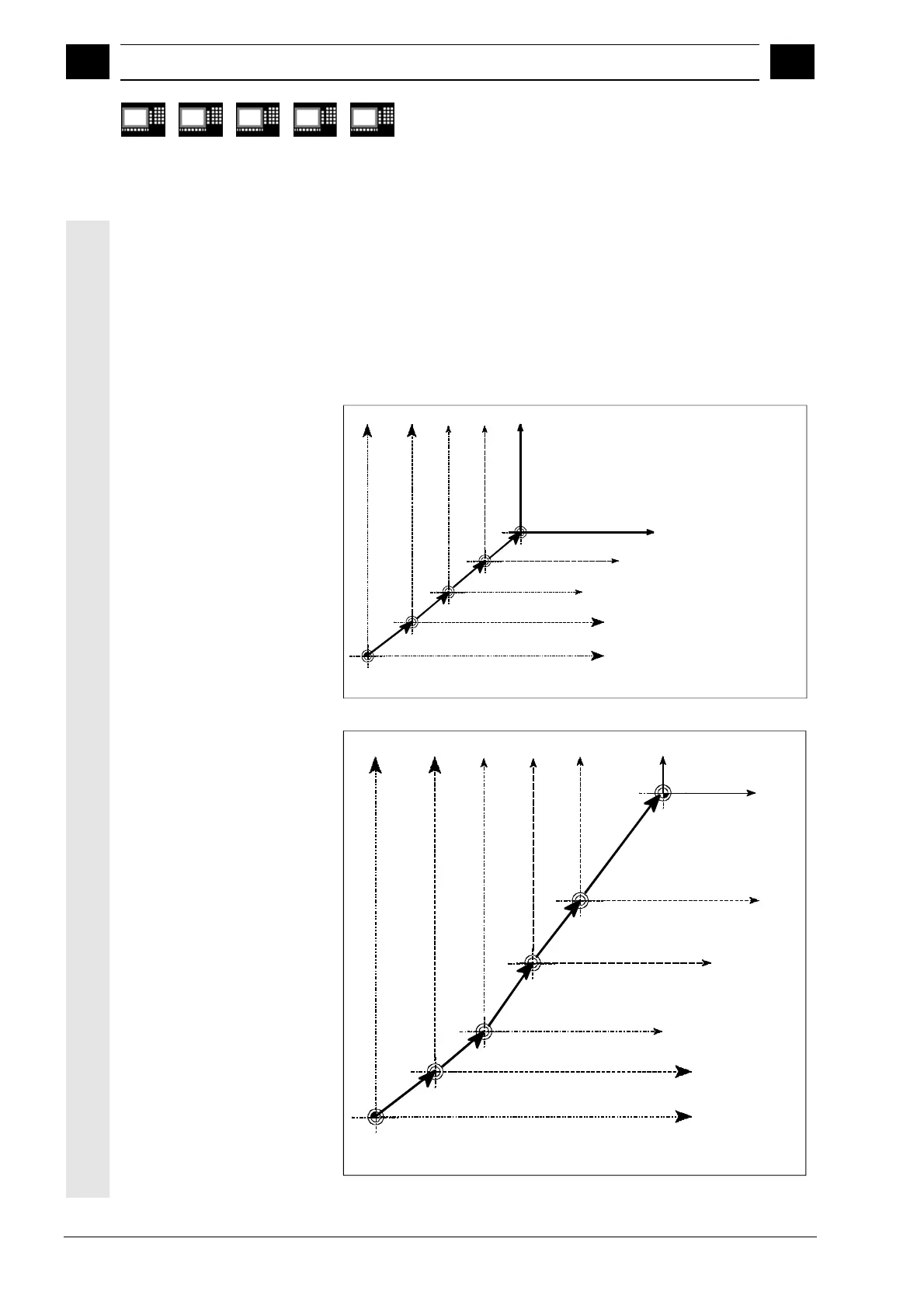
$P_ACTBFRAME
Total base frame
The variable $P_ACTBFRAME determines the
chained total base frame. The variable can only be
read.
$P_ACTBFRAME corresponds to
$P_NCBFRAME[0]
:
...
:
$P_NCBFRAME[n] :
$P_CHBFRAME[0] : ...
:
$P_CHBFRAME[n].
Y
BCS
Y
BCS
X
X
BCS
BCS = Basic coordinate system
BOS = Basic origin system
BOS
Y
BOS
X
BOS
$P_NCBFRAME[0]
$P_NCBFRAME[n], n programmable via $MN_MM_NUM_GLOBAL_BASE_FRAMES
$P_CHBFRAME[0] = $P_BFRAME
$P_CHBFRAME[n], n programmable via $MC_MM_NUM_BASE_FRAMES
$P_ACTBFRAME
$P-ACTBFRAME = $P_NCBFRAME[0] : $P_NCBFRAME[n] : $P_CHBFRAME[0] : $P_CHBFRAME[n]
pro
rammable FRAME
DRF offset, external zero offset
Y
MCS
Kinematic transformation
BCS
MCS
WCS
Y
BCS
Y
WCS
X
MCS
X
X
BCS
WCS
MCS = Machine coordinate system BCS = Basic coordinate system WCS = Workpiece coordinate system
BOS = Basic origin system SZS = Settable zero system
Chained field of base frames
channel-spec. and / or NCU-global
BOS
Y
BOS
X
BOS
G54...G599 settable FRAMES,
channel-spec. and/or NCU-
lobal
SZS
Y
SZS
X
SZS

 Loading...
Loading...



















