10
Motion-Synchronous Action 08.97
10.4 Actions within s
nchronized actions
10
840D
NCU 572
NCU 573
810D
840Di
Siemens AG 2000. All rights reserved
10-370
SINUMERIK 840D/840Di/810D/FM-NC Programming Guide Advanced (PGA) – 04.00 Edition
10.4.12 Clearance control with limited compensation
Programming example
Integrating calculation of the distance values with
boundary check
$AA_OFF_MODE = 1
Important:
The loop gain of the overlying control loop depends
on the setting for the interpolation cycle.
Remedy: Read MD for interpolation cycle and take it
into account.
Note:
Restriction of the velocity of the overlying interpolator
with MD 32020: JOG_VELO
with an interpolation cycle of 12 ms:
Velocity:
0 120
06
06
.
.
/.
min
/
mm
ms
mV
m
V=
Subroutine: Clearance control ON
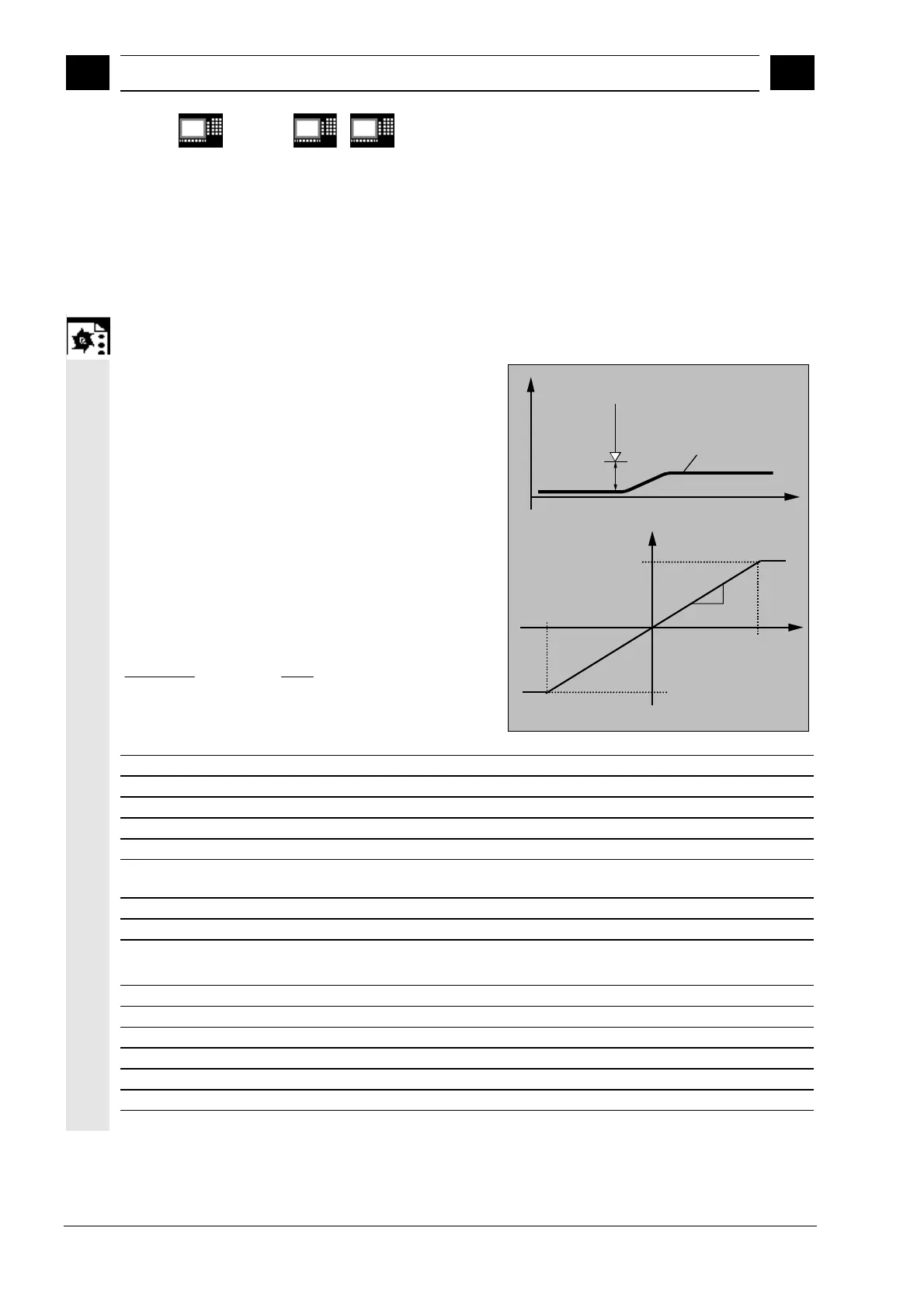
Z
X
Single-dimension distance control
0.2...0.5 mm
Distance
sensor
e.g. Metal sheet
1 V
Upper limit
Overlaid velocity
Lower limit
-10V
+10V
0.6 m/min
%_N_AON_SPF
Subroutine for clearance control ON
PROC AON
$AA_OFF_LIMIT[Z]=1
Determine limiting value
FCTDEF(1, -10, +10, 0, 0.6, 0.12)
Polynomial definition
ID=1 DO SYNFCT(1,$AA_OFF[Z],$A_INA[3])
Clearance control active
ID=2 WHENEVER $AA_OFF_LIMIT[Z]<>0
DO $AA_OVR[X] = 0
Disable axis X when limit value is overshot
RET
ENDPROC
Subroutine: Clearance control OFF
%_N_AOFF_SPF
PROC AOFF
Subroutine for clearance control OFF
CANCEL(1)
Cancel clearance control synchronized action
CANCEL(2)
Cancel off limits check
RET
ENDPROC