13
12.98 Additional Functions
13.2 Learn com
ensation characteristics: QECLRNON
QECLRNOF
13
840D
NCU 571
840D
NCU 572
NCU 573
810D 840Di
Siemens AG 2000. All rights reserved
SINUMERIK 840D/840Di/810D/FM-NC Programming Guide Advanced (PGA) – 04.00 Edition
13-429
13.2 Learn compensation characteristics: QECLRNON, QECLRNOF
Explanation of the commands
QECLRNON
(axis.1,…4)
Activate "Learn quadrant error compensation" function
QECLRNOF
Deactivate "Learn quadrant error compensation" function
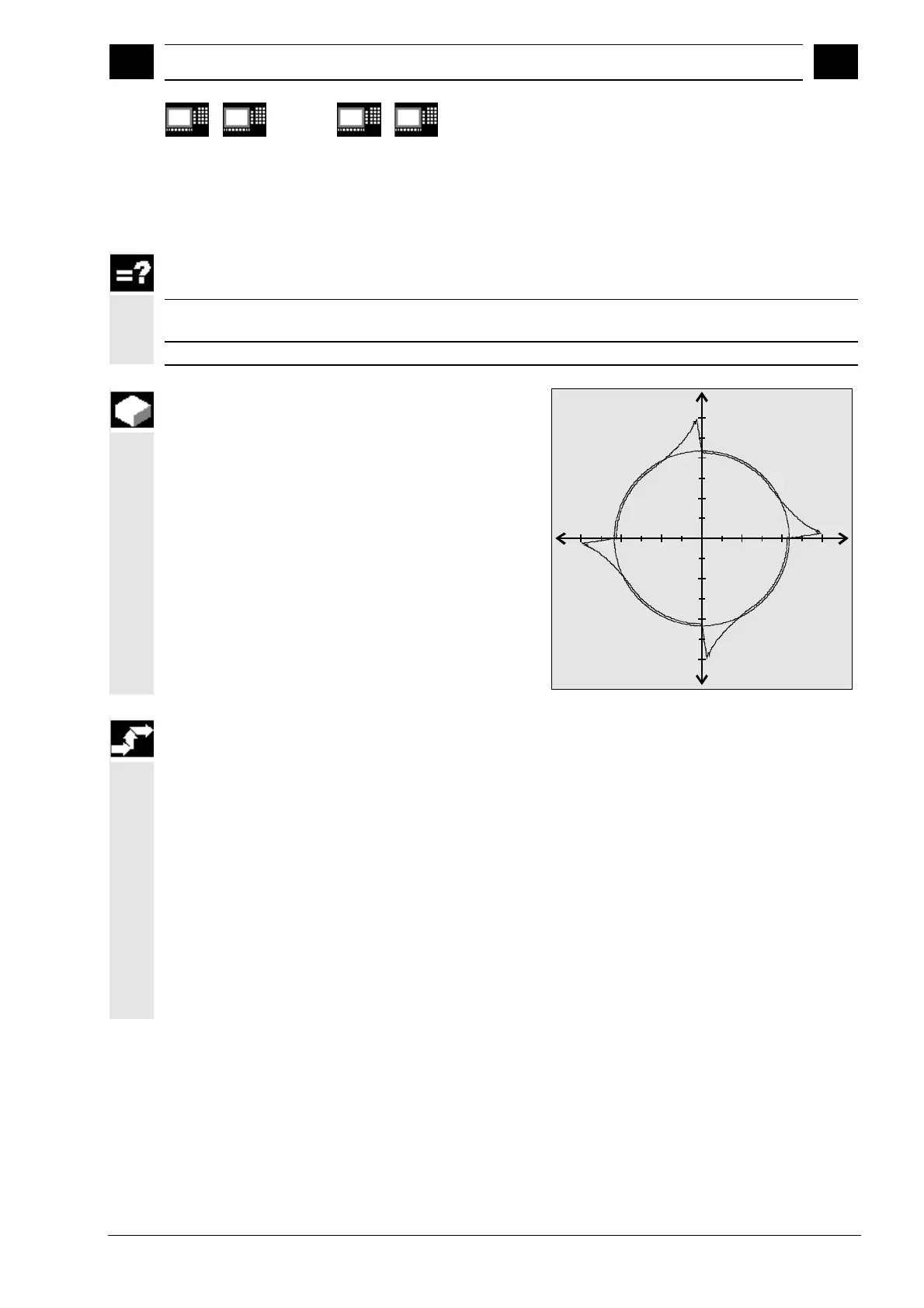
Function
Quadrant error compensation (QEC) reduces
contour errors that occur on reversal of the
traversing direction due to mechanical non-linearities
(e.g. friction, backlash) or torsion.
On the basis of a neural network, the optimum
compensation data can be adapted by the control
during a learning phase in order to determine the
compensation characteristics automatically.
Learning can take place simultaneously for up to
four axes.
10
x/
10
I
III IV
II
µ
x/
µ
Sequence
The traversing movements of the axes required for
the learning process are generated with the aid of an
NC program. The learning movements are stored in
the program in the form of a learning cycle.
First teach-in
Sample NC programs contained on the disk of the
standard PLC program are used to teach the
movements and assign the QEC system variables in
the initial learning phase during startup of the
control: