6
Frames 12.98
6.9 NCU-
lobal frames
SW 5 and hi
her
6
840D
NCU 571
840D
NCU 572
NCU 573
FM-NC 810D 840Di
Siemens AG 2000. All rights reserved
6-218
SINUMERIK 840D/840Di/810D/FM-NC Programming Guide Advanced (PGA)
−
04.00 Edition
$P_PFRAME
Current programmable frame
$P_PFRAME is the programmable frame resulting
from the programming of TRANS/ATRANS,
G58/G59, ROT/AROT, SCALE/ASCALE,
MIRROR/AMIRROR or the assignment of CTRANS,
CROT, CMIRROR, CSCALE to the programmable
FRAME.
Current, programmable frame variable that
establishes the reference between the settable zero
system (SZS) and the workpiece coordinate system
(WCS).
$P_ACTFRAME
The current resulting total frame $P_ACTFRAME
results from the chaining of all base frames, the
current settable frame and the programmable frame.
The current frame is always updated if a frame
element is modified.
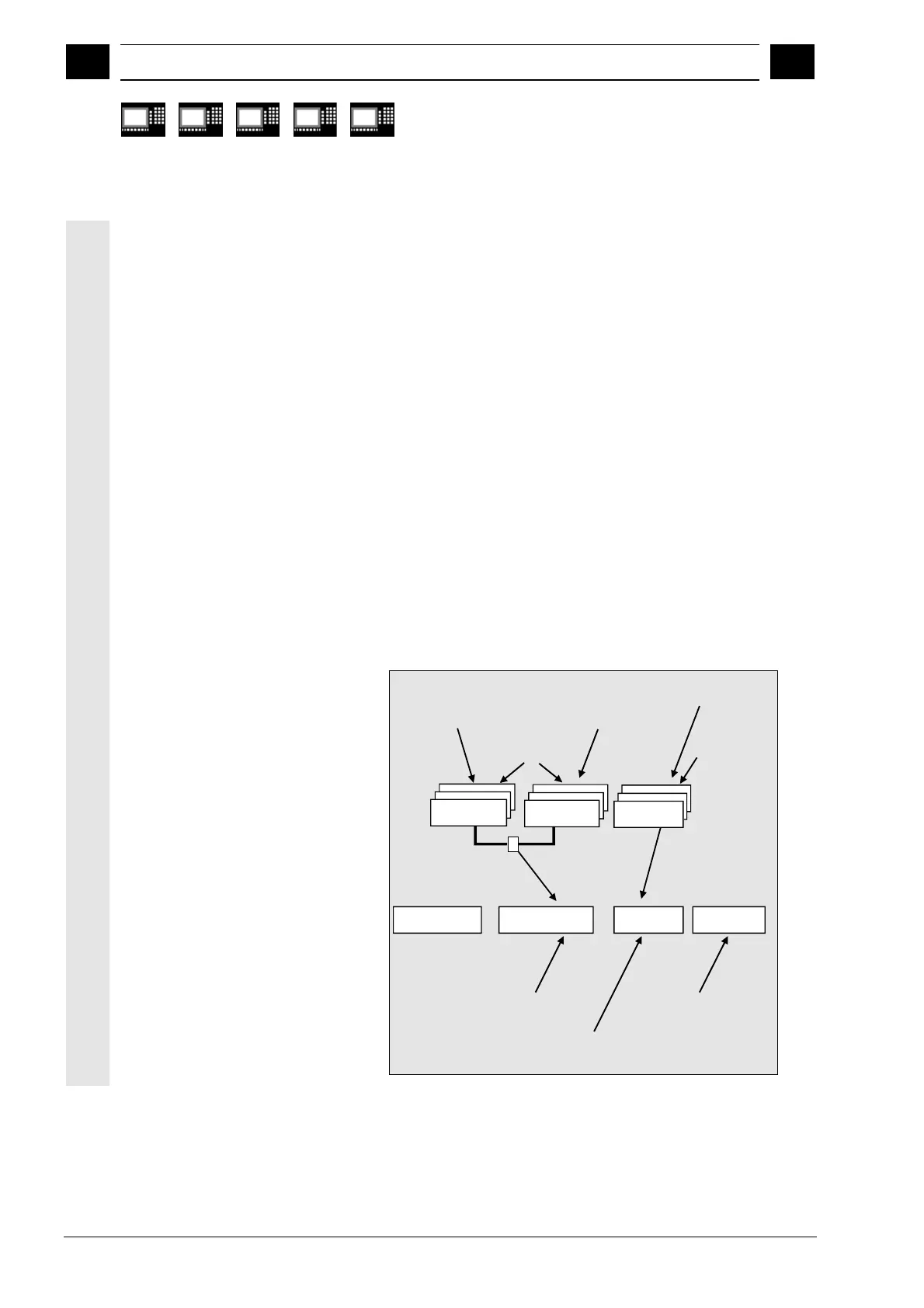
$P_ACTFRAME corresponds to $P_ACTBFRAME : $P_IFRAME : $P_PFRAME
$P_IFRAME :$P_ACTBFRAME :$P_ACTFRAME
$P_UIFR[n]
$P_PFRAME=
Activated via
G500, G54...G599
Entered via program, e.g.
$P_NBFR=CTRANS(X,10) $P_CHBFR=CTRANS(Z,10)
Entered
via MMC
Entered via program, e.g.
$P_UIFR=CTRANS(X,10)
Entered via program, e.g.
$P_ACTBFRAME=$P_NCBFRAME[1]
Entered via program, e.g.
$P_IFRAME=CTRANS(X,10)
Entered via program, e.g.
$P_PFRAME=CTRANS(X,10)
or TRANS X10
:
$P_CHBFR[n]$P_NCBFR[n]
Entered
via MMC