OPERATOR’S MANUAL
series Robot Controller
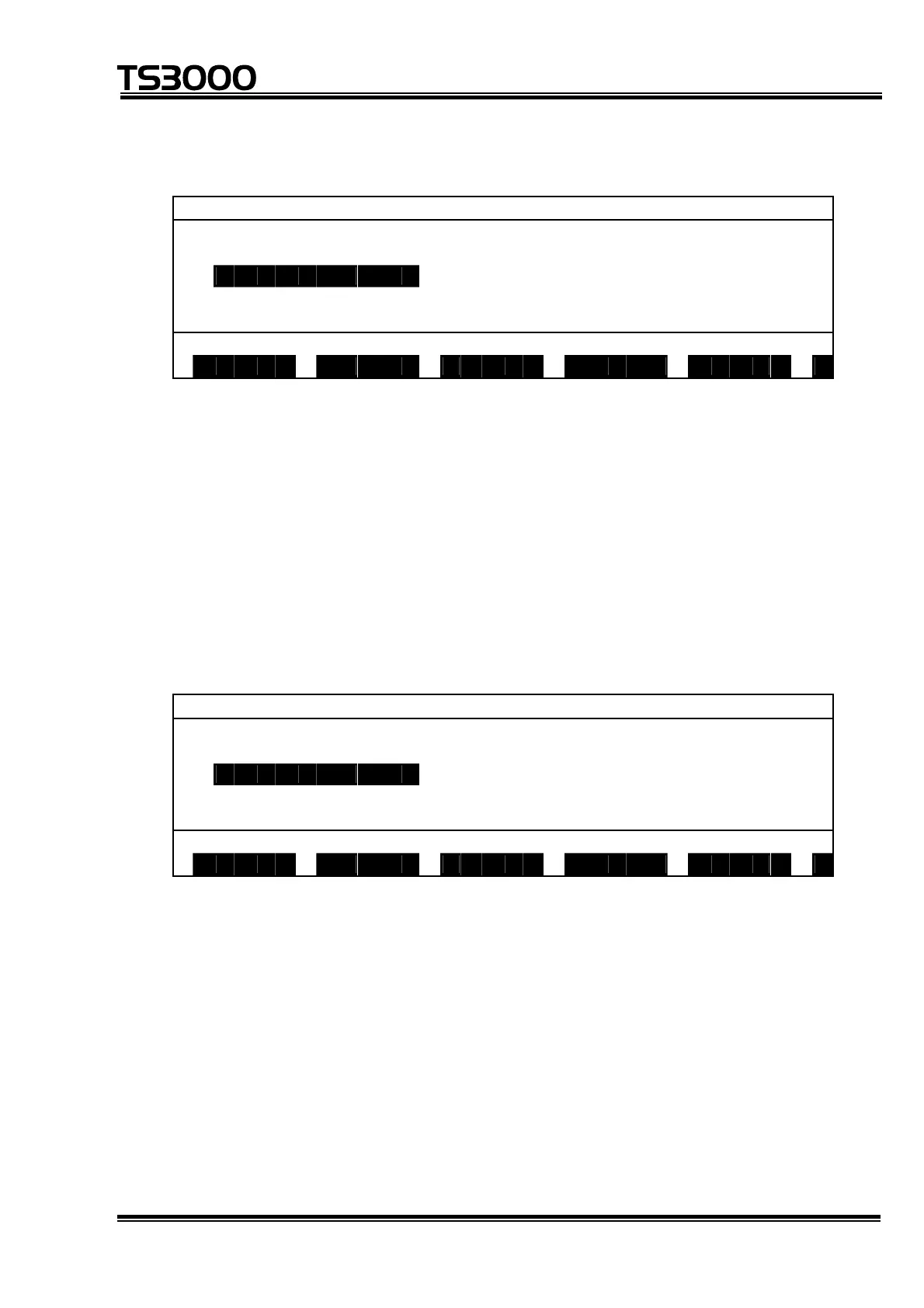
Press [TEACH].
P O I N T X Y Z
↑
P O I N T 0 0 0 0 3 = 1 0 0 , 1 0 0 , 1 0 0 ,
P O I N T 0 0 0 0 4 = 2 0 0 , 2 0 0 , 2 0 0 ,
P O I N T 0 0 0 0 5 = 300 , 300 , 3 00 ,
P O I N T 0 0 0 0 6 = 4 0 0 , 4 0 0 , 4 0 0 ,
↓
P O I N T 0 0 0 0 7 = 5 0 0 , 5 0 0 , 5 0 0 ,
T E A C H : P R E S S < E X E > w / . w o r l d
To input a positional data, press the EXE key. (To stop, press the ESC key.)
When the robot current position is as shown below, the following display
appears.
X 100.0
Y 0
Z 0
C 0
T 0
CONFIG FREE
P O I N T X Y Z
↑
P O I N T 0 0 0 0 3 = 1 0 0 , 1 0 0 , 1 0 0 ,
P O I N T 0 0 0 0 4 = 2 0 0 , 2 0 0 , 2 0 0 ,
P O I N T 0 0 0 0 5 =100, 0 , 0,
P O I N T 0 0 0 0 6 = 4 0 0 , 4 0 0 , 4 0 0 ,
↓
P O I N T 0 0 0 0 7 = 5 0 0 , 5 0 0 , 5 0 0 ,
P O I N T 0 0 0 0 5 w / . w o r l d
< N O S A V F I N D T E A C H M - T O C U T >
(3) Cautions
• The main cursor will not move even after finishing teaching.
• Unless actually used tool coincides with tool coordinate data selected, we
cannot guarantee the tool tip position at program execution.
STE 80720
– 5-28 –

 Loading...
Loading...





