OPERATOR’S MANUAL
series Robot Controller
5.4.6 Setting and Canceling of the Tool Coordinate System [TOOL]
(1) Function
Sets a specified coordinate in the tool coordinate system. If this operation is
done for a coordinate already set as the tool coordinate, setting of the tool
coordinate system is canceled.
(2) Procedures
Assume that you are going to set "TRANS00002" in the tool coordinate system.
(a) Step 1: Command selection.
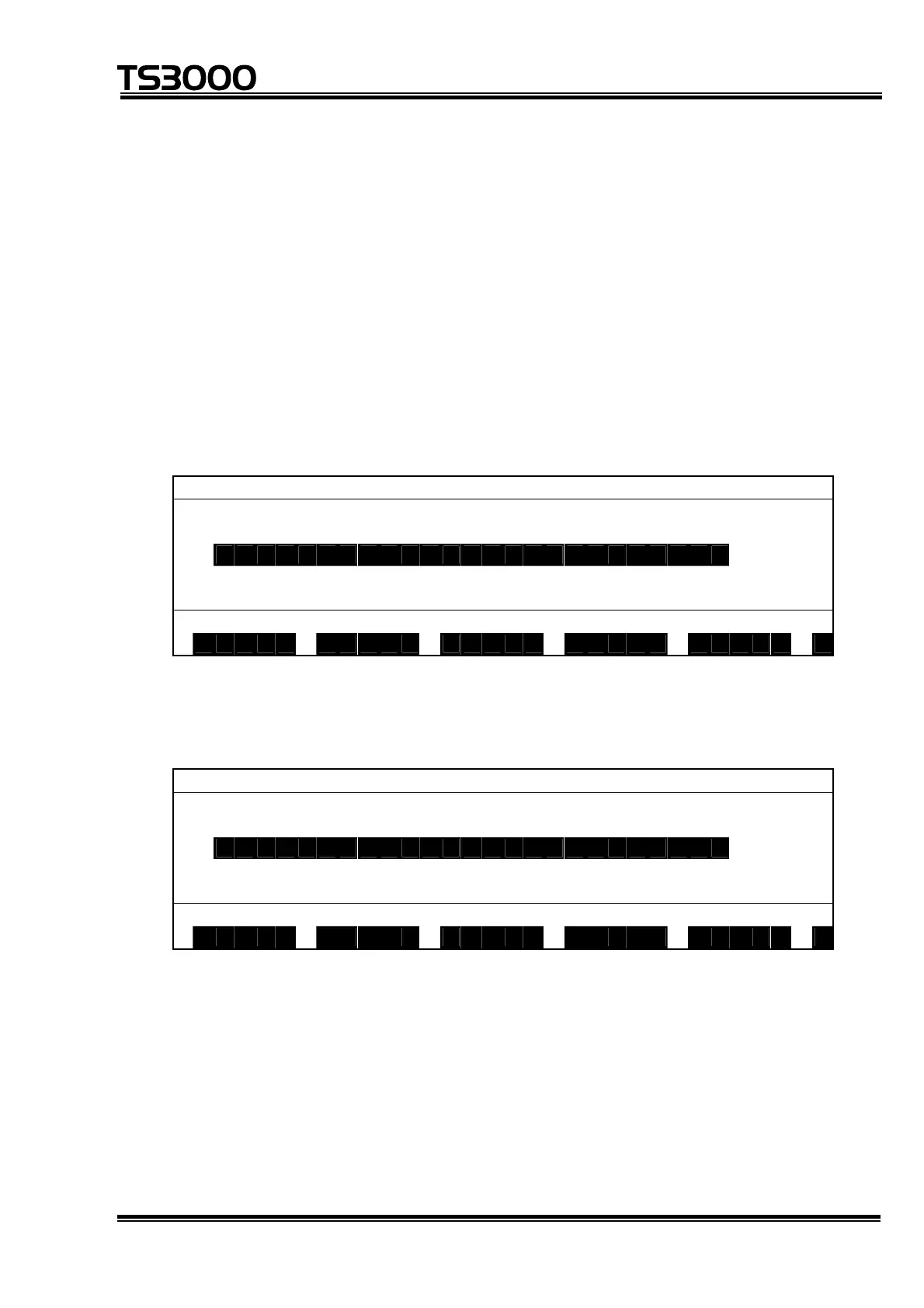
Move the main cursor to "TRANS00002", and the following display appears.
T R A N S S E L E C T I O N [ 3 / 1 1 ]
. w o r l d 1 0
w T R A N S 0 0 0 0 1 0
T R A N S 0 0 0 0 2 5
t T R A N S 0 0 0 0 3 0
↓
T R A N S 0 0 0 0 4 4
T R A N S 0 0 0 0 2
S A V E P R G P Y L D W O R K T O O L >
Press [TOOL], and the data of "TRANS00002" is set in the tool coordinate
system and the following display appears.
T R A N S S E L E C T I O N [ 3 / 1 1 ]
. w o r l d 1 0
w T R A N S 0 0 0 0 1 0
t T R A N S 0 0 0 0 2 5
T R A N S 0 0 0 0 3 0
↓
T R A N S 0 0 0 0 4 4
T R A N S 0 0 0 0 2
S A V E P R G P Y L D W O R K T O O L >
(3) Cautions
• If another coordinate was already set as the tool coordinate, it is canceled by
this function.
• A coordinate set as the tool coordinate is identified by "t" in the 1st column of
the display.
STE 80720
– 5-58 –

 Loading...
Loading...





