OPERATOR’S MANUAL
series Robot Controller
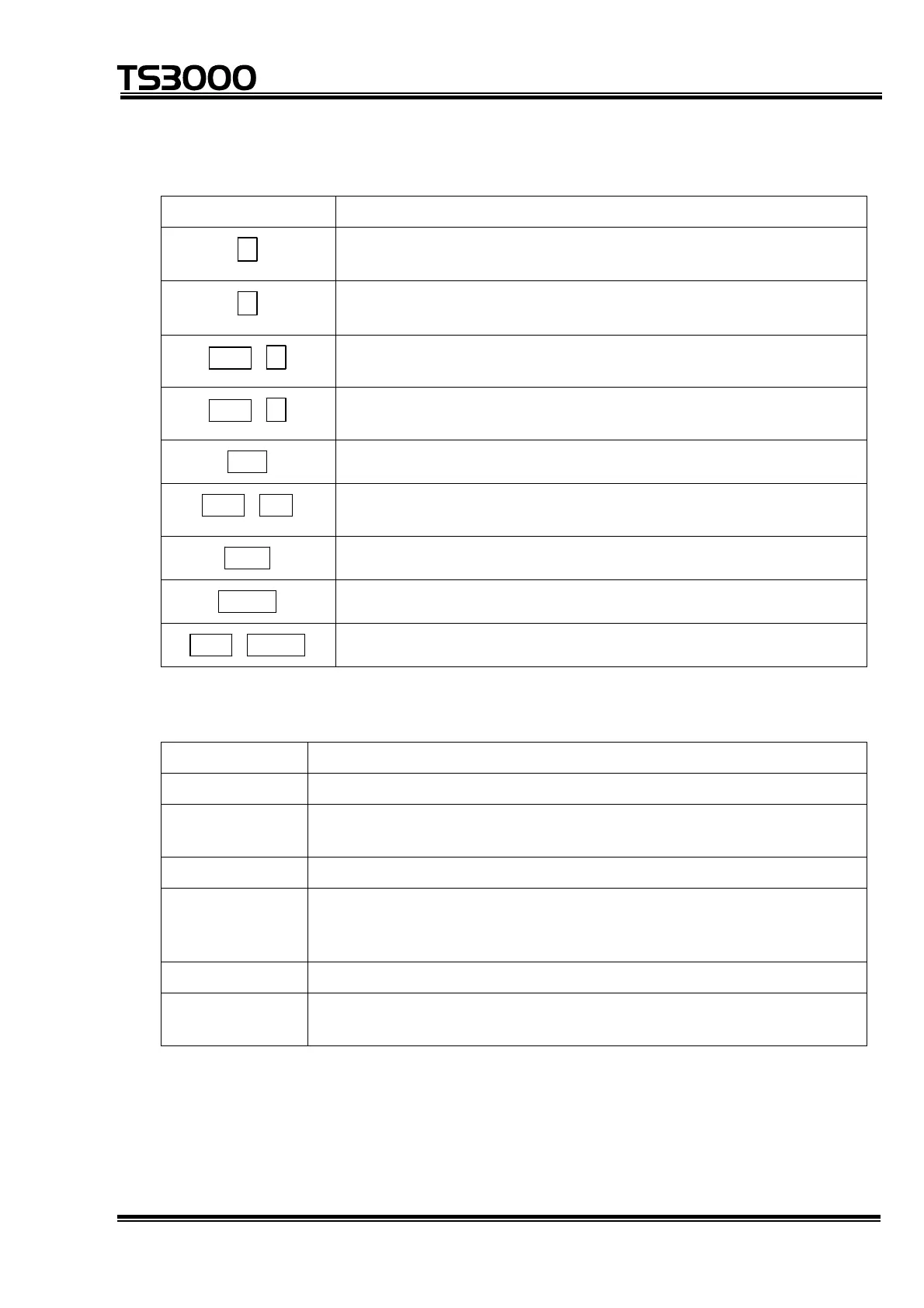
Keys operative in this mode and their operations are shown below.
Key Descriptions
↑
Used to move the main cursor to each data in the order of
[Name ← X ← Y ← Z ← C ← T ← Name].
↓
Used to move the main cursor to each data in the order of
[Name → X → Y → Z → C → T → Name].
ALT + ↑
Used to display the defined detailed coordinate data before
current coordinate data.
ALT + ↓
Used to display the defined detailed coordinate data after
current coordinate data.
INS
Used to create a new coordinate data.
ALT +BS
Used to delete a current coordinate data and display in detail
the coordinate data defined next.
EXE
Used to edit a data indicated by the main cursor.
NEXT
Used to toggle the menu (resulting in the next menu).
ALT + NEXT
Used to toggle the menu (resulting in the previous menu).
Operations of each menu are shown below.
Menu Descriptions
[SAVE] Used to save a data and quit the data editor.
[TEACH] Used to teach a current position of the robot in a coordinate data
indicated by the main cursor.
[DIR] Used to select the coordinate data directory display.
[WORK] Used to select the positional data directory display where you can
edit a positional data belonging to a coordinate system indicated
by the main cursor.
[FIND] Used to select the coordinate name search mode.
[NOSAV] Used to quit the editor without saving data. All changed data are
aborted.
Each menu of [SAVE] and [NOSAV] is the same as in the positional data directory
display mode and is not described in this paragraph.
STE 80720
– 5-67 –

 Loading...
Loading...





