STE 80720
– 10-13 –
OPERATOR’S MANUAL
series Robot Controller
10.4 Current Position Display [POS]
(1) Function
Displays the robot position in the joint, world or work coordinate system.
(2) Procedures
(a) Step 1: Command selection.
Press the NEXT key repeatedly until [POS] is displayed in the menu. Press
the corresponding function key, and the following joint coordinate system
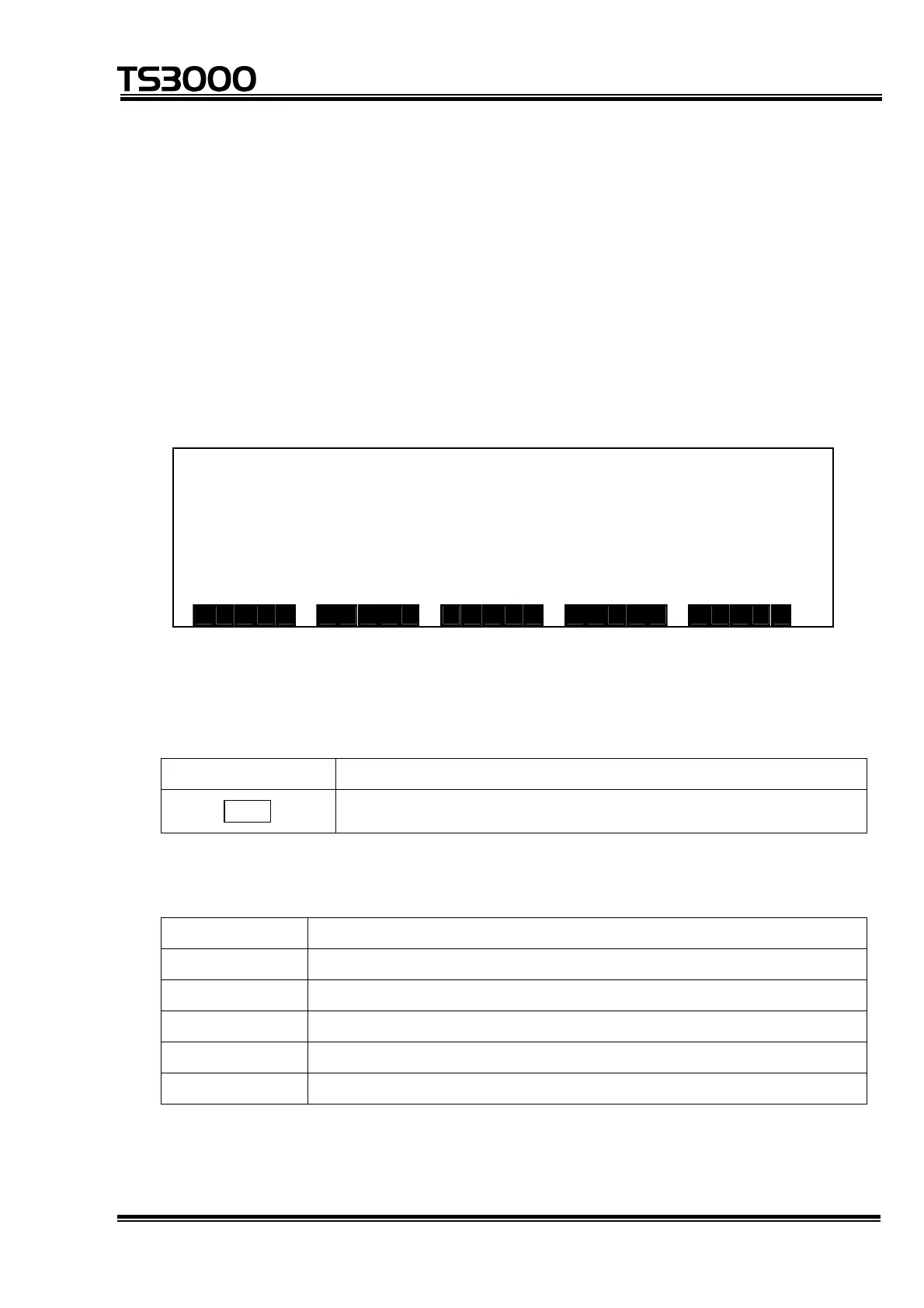
position display appears.
J O I N T
J 1 : 0 . 000 [ deg ]
J 2 : 0 . 000 [ deg ]
J 3 : 0 . 0 0 0 [ m m ]
J 4 : 0 . 000 [ deg ]
J 5 : 0 . 000 [ deg ]
J O I N T W O R L D W O R K P - C M D P - F B K
• Coordinate value of respective joints are displayed.
The key operative in this mode and its operation are shown below.
Key Descriptions
ESC
Used to return the system to the utility display.
Operations of each menu are shown below.
Menu Descriptions
[JOINT] Used to call the position display in the joint coordinate system.
[WORLD] Used to call the position display in the world coordinate system.
[WORK] Used to call the position display in the work coordinate system.
[P-CMD] Used to call the position command display.
[P–FBK] Used to call the position feedback display.

 Loading...
Loading...





