STE 80720
– 10-34 –
OPERATOR’S MANUAL
series Robot Controller
10.8 Joint Limit Setting [J–LIM]
(1) Function
Displays joint limit set values and sets a joint limit value as necessary.
(2) Procedures
(a) Step 1: Command selection.
Press the NEXT key repeatedly until [J–LMT] is displayed in the menu.
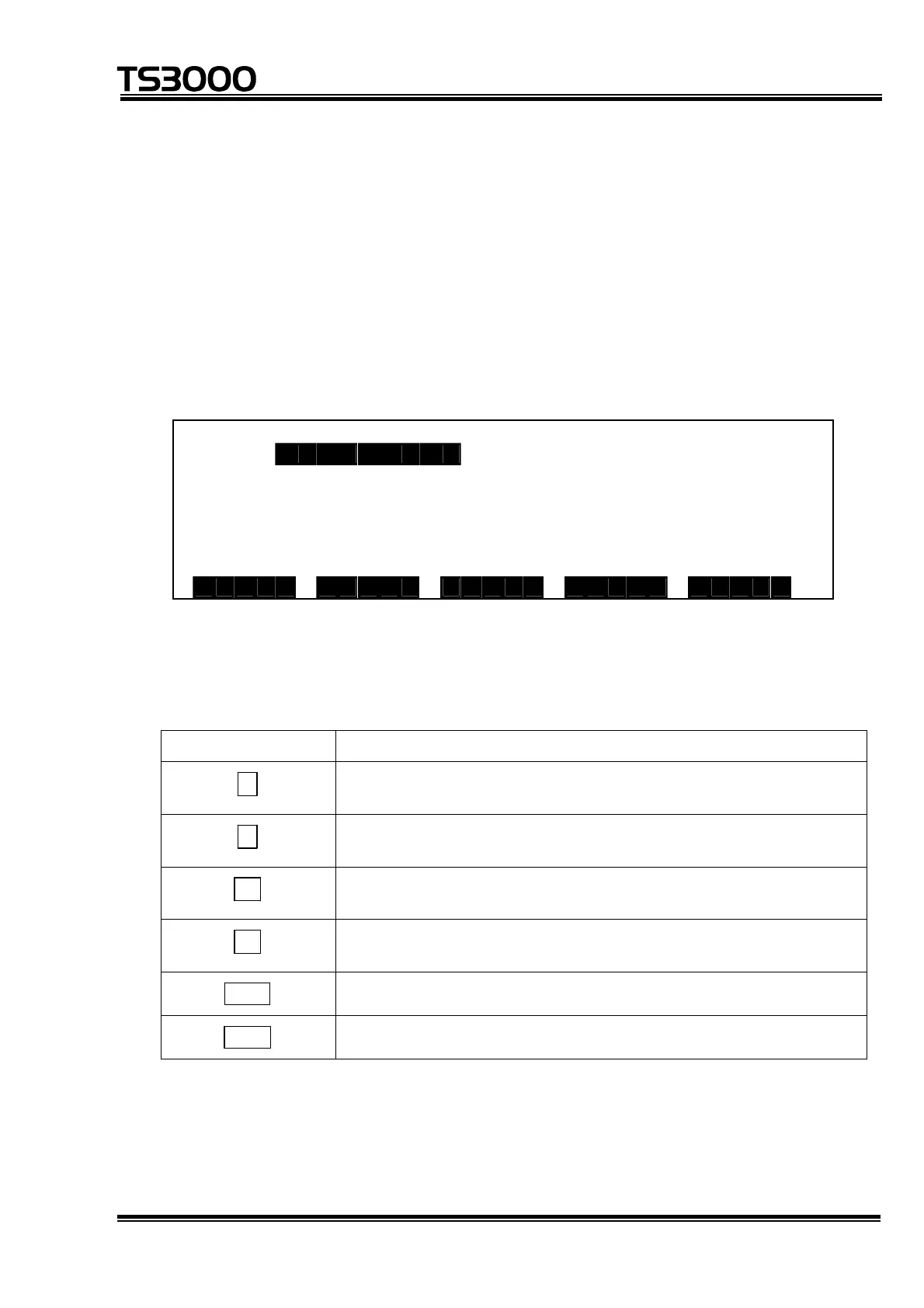
Press the [J-LIM] key, and the following joint limit set value display appears.
[ - ] L I M I T [ + ] L I M I T
J 1 : - 1 1 0 . 0 0 0 1 1 0 . 0 0 0 [ d e g ]
J 2 : - 1 3 7 . 0 0 0 1 3 7 . 0 0 0 [ d e g ]
J 3 : 0 . 0 0 0 2 0 0 . 5 0 0 [ m m ]
J 4 : - 2 8 0 . 0 0 0 2 8 0 . 0 0 0 [ d e g ]
J 5 : 0 . 0 0 0 0 . 0 0 0 [ d e g ]
Both minus (–) and plus (+) limit coordinates of each joint are displayed.
Keys operative in this mode and their operations are shown below.
Key Descriptions
↑
Used to move the main cursor up. If it is located at the top,
the cursor will not move at all.
↓
Used to move the main cursor down. If it is located at the
bottom, the cursor will not move at all.
→
Used to move the cursor to the right. If it is located on the
right end, the cursor will not move at all.
←
Used to move the main cursor to the left. If it is located on
the left end, the cursor will not move at all.
EXE
Used to change the data indicated by the main cursor.
ESC
Used to return the system to the utility display.

 Loading...
Loading...





