ZED-F9P-Integration Manual
UBX-18010802 - R02
10 Appendix Page 109 of 114
Advance Information
10 Appendix
10.1 RTCM ITRF Geodetic models
RTK is a differential system where the rover uses the reference datum of the reference station. The
International Terrestrial Reference Frame (ITRF) must be obtained from the reference network and
then used to transform the rover position output to match the required reference frame. The rover
will not output the position in the local receiver WGS84 (based on ITRF2008) datum, it will match the
reference receiver (or base) reference frame. The user application will need to do the transformation
for use in a mapping application if it does not use the same reference frame. An offset can occur
if this is not done.
The list of ITRF reference frame years are below:
• ITRF94
• ITRF96
• ITRF97
• ITRF2000
• ITRF2005
• ITRF2008
• ITRF2014
There are other similar reference systems used by GNSS correction services such as the ETRS89
(ETRS89.).
For example the EUREF network uses the ETRS89 reference frame and this info can be found on
the homepage: EUREF.
See the ITRF website for information and an on line transform calculator: ITRF.
Another on-line tool can be found here:Transformation.
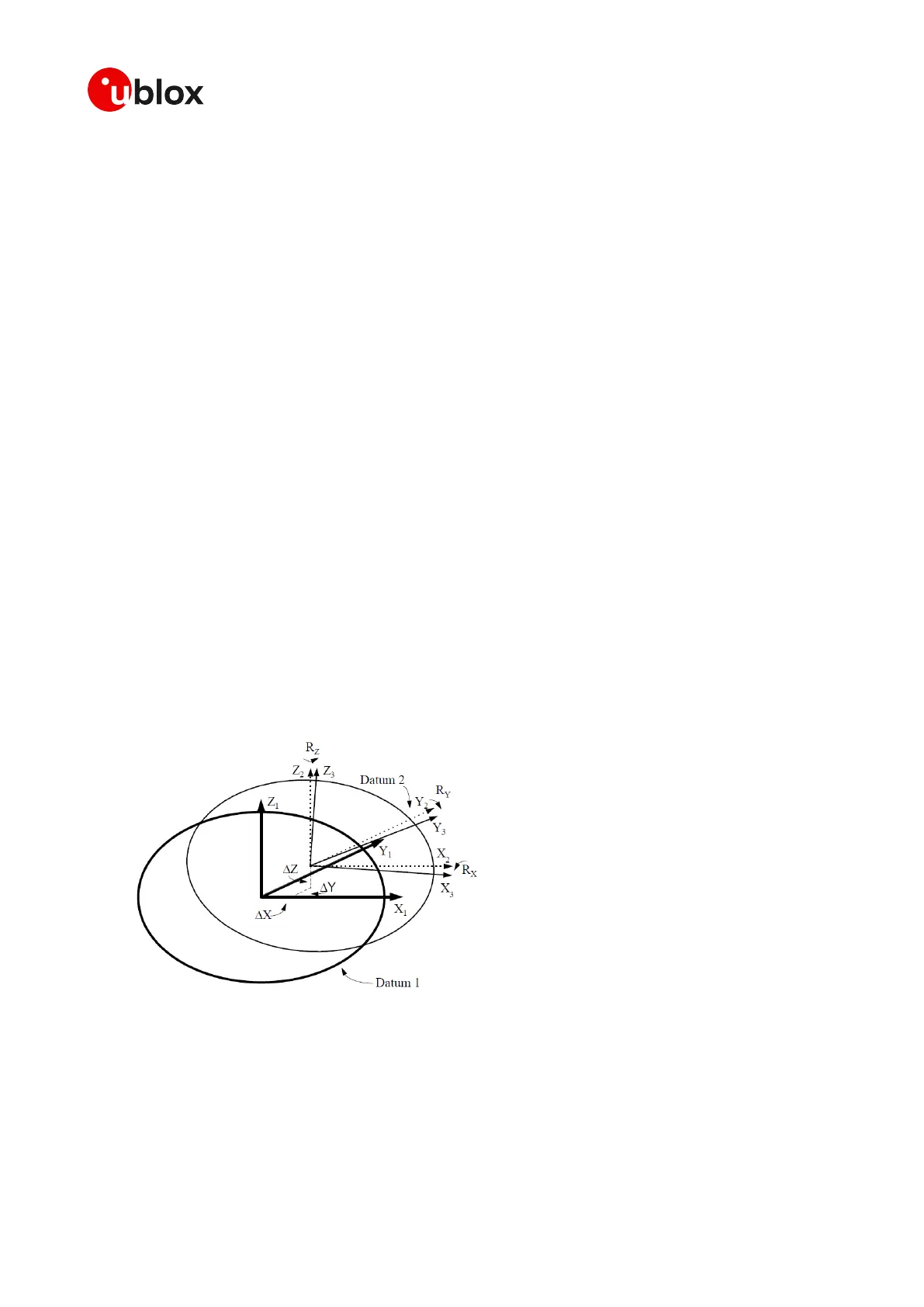
Figure 80: Transforming between two datums
The reference frame of the reference receiver (or base) must be transformed by the user into
the required system being used by their application and mapping system. If comparing the rover
position with a reference system the same RTCM stream should be used to ensure the reference
and rover are outputting the same position. If doing post processing of a reference system its output
must be transformed to same ITRF and datum being used by the rover.
 Loading...
Loading...






