ZED-F9P-Integration Manual
UBX-18010802 - R02
3 Getting started Page 12 of 114
Advance Information
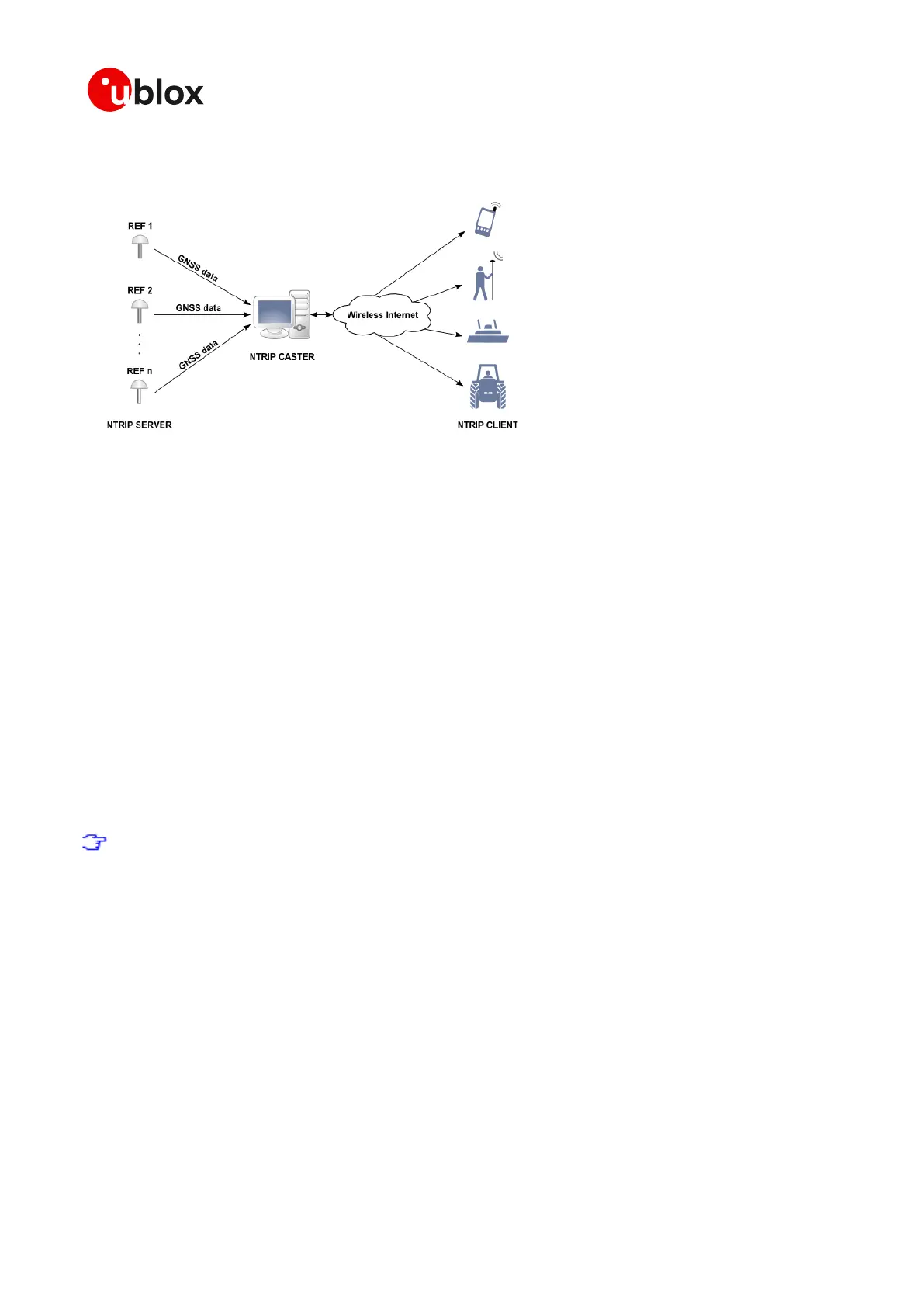
Figure 5: NTRIP system
First it is important to ensure the rover is receiving the right RTCM messages. In the following
sections we cover the minimum recommended RTCM messages for a rover receiver. If a ZED-F9P is
used as a local base supplying corrections we list the minimum recommended messages to enable
for operation.
When using a ZED-F9P rover with a correction service or other survey grade receiver it is important
to ensure that the rover is receiving supported messages. A list of supported RTCM messages is
provided to check against those provided by a chosen correction stream.
3.1 RTCM corrections
The ZED-F9P high precision receiver must receive RTCM corrections for all GNSS constellations
that it receives in order to function as an RTK rover. The ZED-F9P high precision receiver needs to
output RTCM corrections if being used as an RTK base. The correct RTCM messages must also be
selected for the GNSS constellations and signals being received. The supported input and output
messages are listed in the following sections.
RTCM is a binary data protocol for communication of GNSS correction information. The ZED-
F9P high precision receiver supports RTCM as specified by RTCM 10403.3, Differential GNSS
(Global Navigation Satellite Systems) Services – Version 3 (October 7, 2016).
For rover configuration with the default GNSS configuration, the recommended list of RTCM input
messages are:
• RTCM 1005
• RTCM 1074
• RTCM 1084
• RTCM 1094
• RTCM 1124
• RTCM 1230
For base configuration with the default GNSS configuration, the recommended list of RTCM output
messages are:
• RTCM 1005
• RTCM 1074
 Loading...
Loading...






