ZED-F9P-Integration Manual
UBX-18010802 - R02
4 Receiver description Page 38 of 114
Advance Information
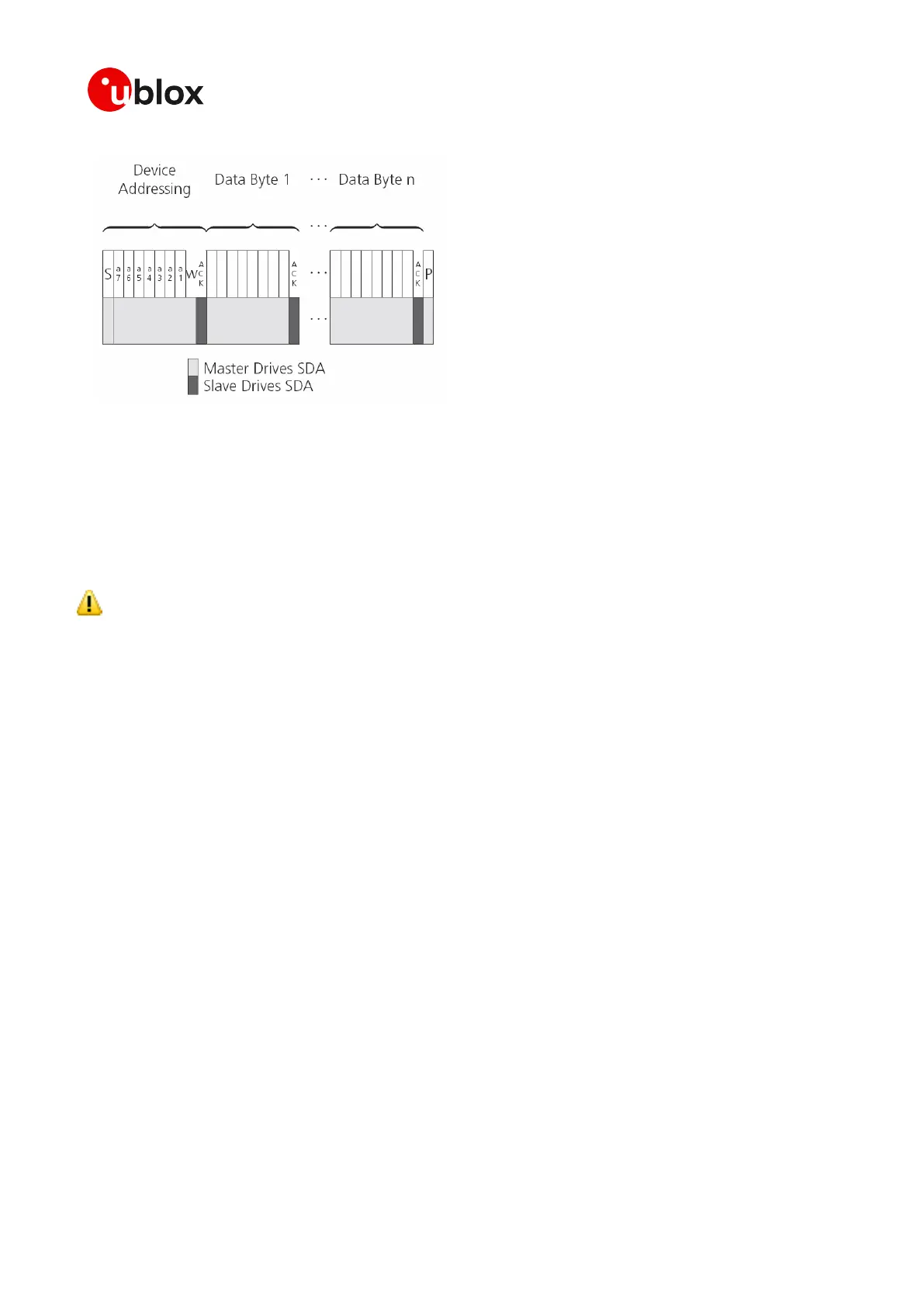
Figure 24: DDC Write Access
4.5.6 SPI Port
A Serial Peripheral Interface (SPI) bus is available with selected receivers. See our on line product
descriptions for availability.
SPI is a four-wire synchronous communication interface. In contrast to UART, the master provides
the clock signal, which therefore doesn't need to be specified for the slave in advance. Moreover, a
baud rate setting is not applicable for the slave.
CAUTION The SPI clock speed is limited depending on hardware and firmware versions!
4.5.6.1 Maximum SPI clock speed
The receiver supports a maximum SPI clock speed of 5.5 MHz.
4.5.6.2 Read Access
As the register mode is not implemented for the SPI port, only the UBX/NMEA message stream
is provided. This stream is accessed using the Back-To-Back Read and Write Access (see section
Back-To-Back Read and Write Access). When no data is available to be written to the receiver, MOSI
should be held logic high, i.e. all bytes written to the receiver are set to 0xFF.
To prevent the receiver from being busy parsing incoming data, the parsing process is stopped after
50 subsequent bytes containing 0xFF. The parsing process is re-enabled with the first byte not
equal to 0xFF.
If the receiver has no more data to send, it sets MISO to logic high, i.e. all bytes transmitted decode
to 0xFF. An efficient parser in the host will ignore all 0xFF bytes which are not part of a message
and will resume data processing as soon as the first byte not equal to 0xFF is received.
4.5.6.3 Back-To-Back Read and Write Access
The receiver does not provide any write access except for writing UBX and NMEA messages to the
receiver, such as configuration or aiding data. For every byte written to the receiver, a byte will
simultaneously be read from the receiver. While the master writes to MOSI, at the same time it needs
to read from MISO, as any pending data will be output by the receiver with this access. The data
on MISO represents the results from a current address read, returning 0xFF when no more data is
available.
 Loading...
Loading...






