ZED-F9P-Integration Manual
UBX-18010802 - R02
3 Getting started Page 28 of 114
Advance Information
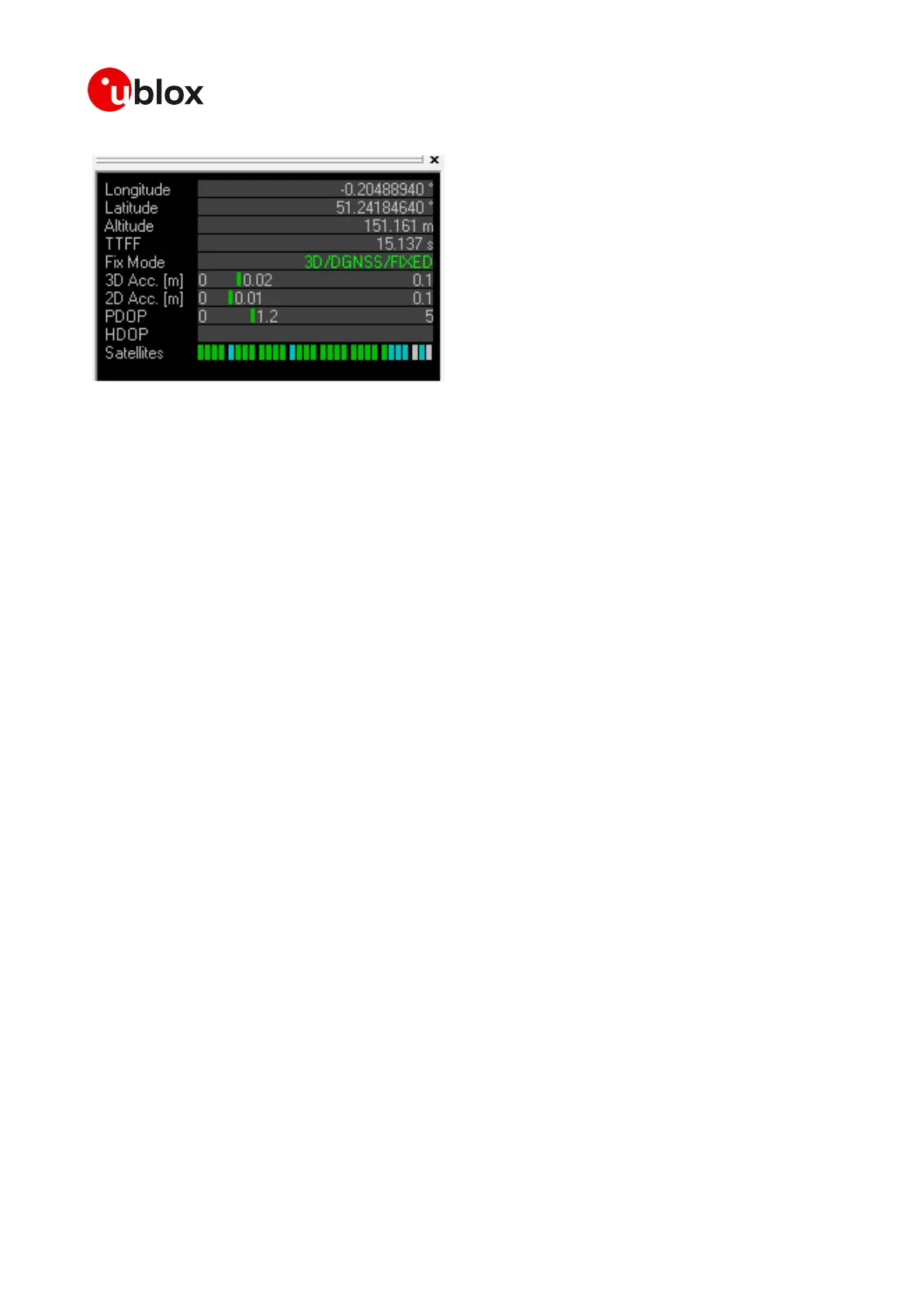
Figure 19: Rover: u-center data view with RTK Fixed
3.5.10 RTK rover mode output in messages
RTK Rover Mode will result in following modified output:
• NMEA-GGA: The quality field will be 4 for RTK fixed and 5 for RTK float (see NMEA Position Fix
Flags). The age of differential corrections and base station ID will be set.
• NMEA-GLL, NMEA-VTG: The posMode indicator will be D for RTK float and RTK fixed (see NMEA
Position Fix Flags).
• NMEA-RMC, NMEA-GNS: The posMode indicator will be F for RTK float and R for RTK fixed (see
NMEA Position Fix Flags).
• UBX-NAV-PVT: The carrSoln flag will be set to 1 for RTK float and 2 for RTK fixed.
• UBX-NAV-RELPOSNED: The diffSoln and refPosValid flags will be set. The carrSoln flag
will be set to 1 for RTK float and 2 for RTK fixed. In moving baseline rover mode, the isMoving
flag will be set, and the refPosMiss and refObsMiss flags will be set for epochs during which
extrapolated base position or observations have been used.
• UBX-NAV-SAT: The diffCorr flag will be set for satellites with valid RTCM data. The
rtcmCorrUsed, prCorrUsed, and crCorrUsed flags will be set for satellites for which the RTCM
corrections have been applied.
• UBX-NAV-SIG: For signals to which the RTCM corrections have been applied, the correction
source will be set to RTCM3 OSR and the crUsed, prCorrUsed, and crCorrUsed flags will be set.
• UBX-NAV-STATUS: The diffSoln flag will be set; the diffCorr flag will be set.
• If the baseline exceeds 50km and a message type 1005 or type 1006 is received, a UBX-INF-
WARNING will be output, e.g. "WARNING: DGNSS baseline big: 52.7 km"
3.6 Default GNSS configuration
The default GNSS configuration is:
• GPS L1C/A L2C
• GLO L1OF L2OF
• GAL E1B/C E5b
• BDS B1I
• QZSS L1C/A L2C
BDS B2I is also supported but not enabled in the default GNSS configuration.
The configuration settings can be modified using UBX protocol configuration messages. For more
information, see the ZED-F9P Interface Description [2].
 Loading...
Loading...






