ZED-F9P-Integration Manual
UBX-18010802 - R02
1 Overview Page 8 of 114
Advance Information
1.2 Typical ZED-F9P application setups
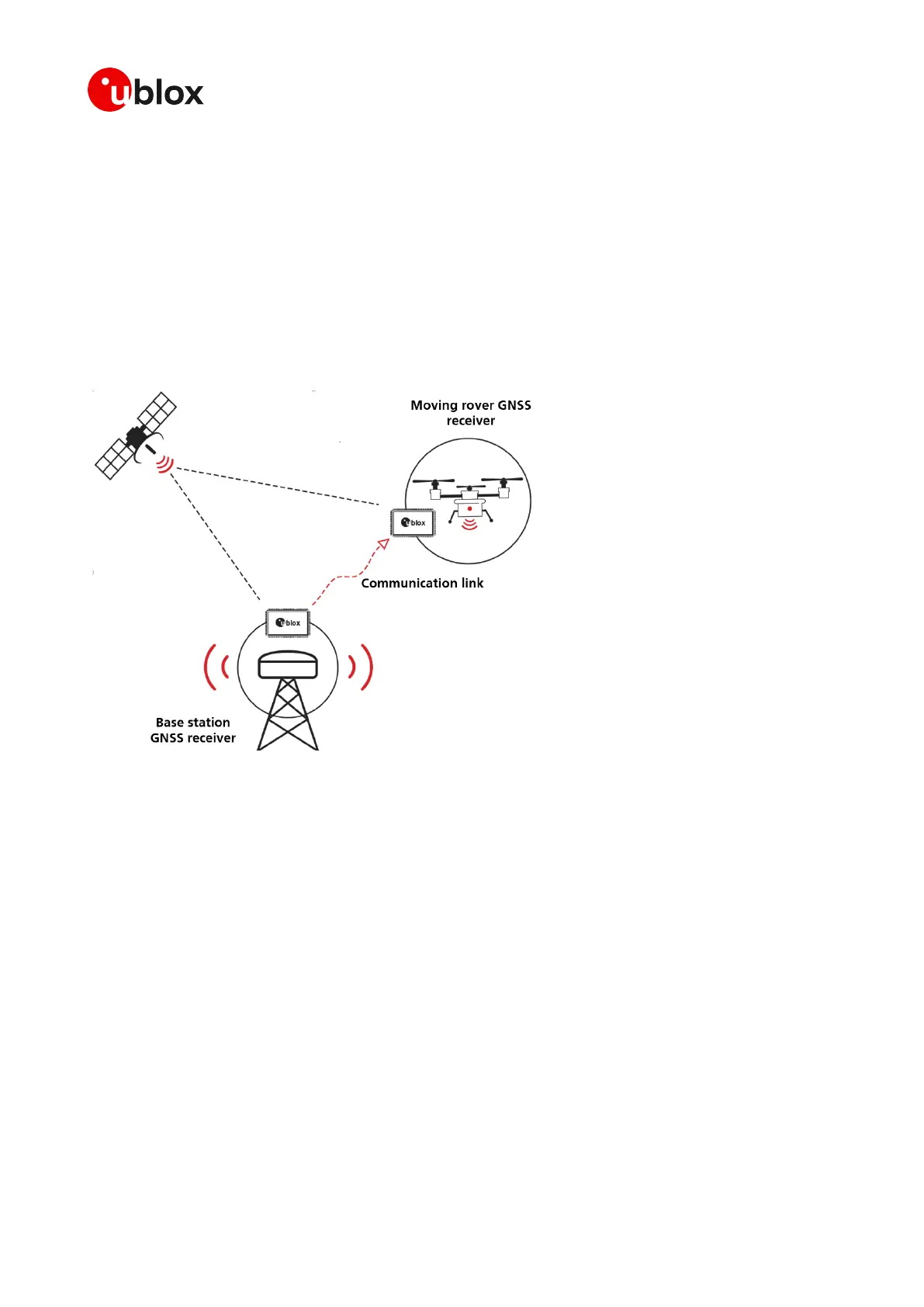
Two application examples have been illustrated as typical system implementations. Both are
representative of a simple "short baseline" set-up in which the Base and Rover receivers are within a
few hundred meters of each other. Here the ZED-F9P is used as a base station providing corrections
to a mobile rover receiver.
Alternatively, the rover can use corrections provided over longer baselines from a correction stream
distributed as a subscription service. This method can use a single fixed reference source which is
local (within 50km) to the rover receiver or via a Virtual Reference Service (VRS) in which corrections
are synthesized for the rovers location.
1.2.1 ZED-F9P in a drone application
Figure 2: ZED-F9P base and rover in a short baseline drone application
 Loading...
Loading...






