www.Wayne-Dalton.com
349981 REV2_05/17/2016
©
Copyright 2016 Wayne Dalton, a division of Overhead Door Corporation
52
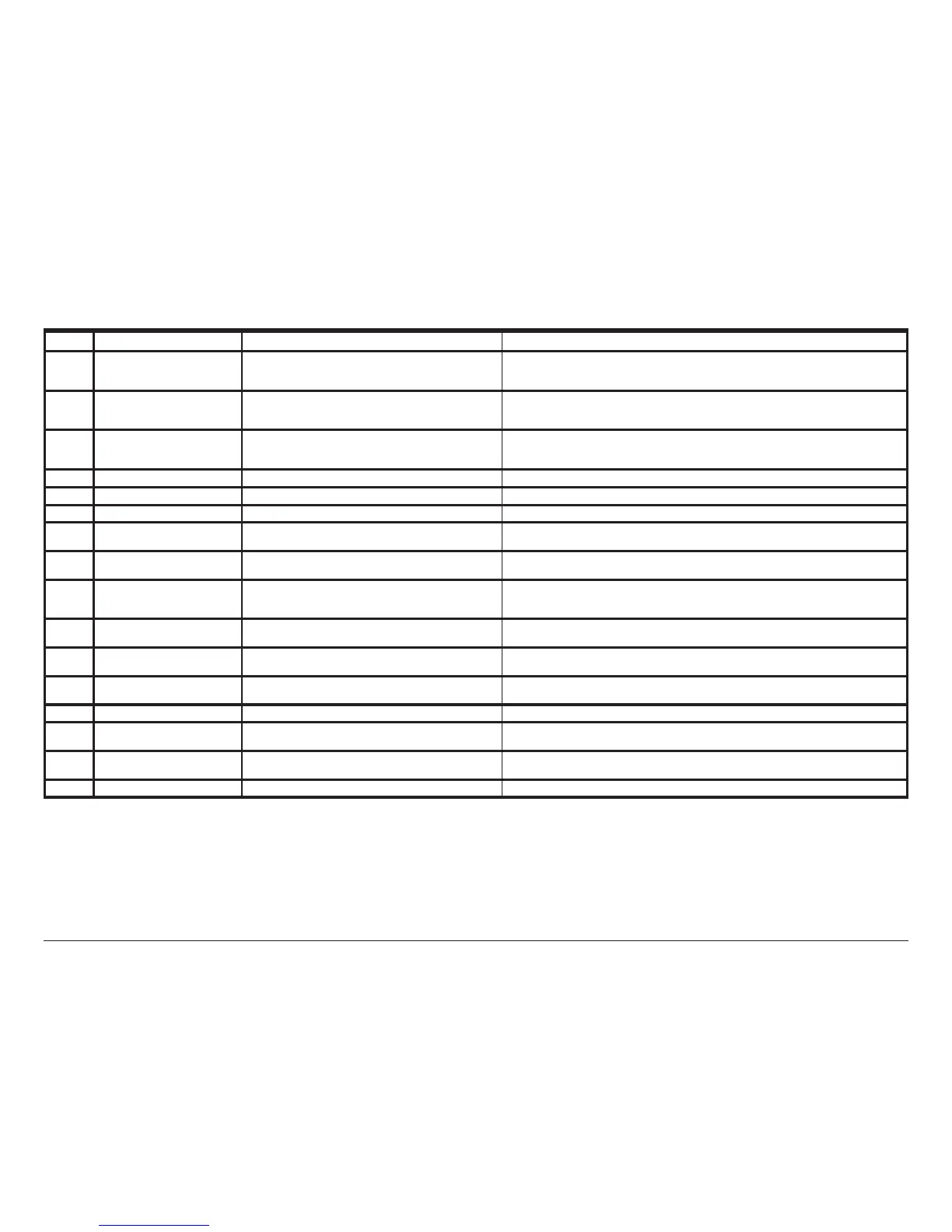
CONTROL PANEL ERROR MESSAGES DOOR CONTROL ERROR CODES
CODE DESCRIPTION PROBLEM POSSIBLE SOLUTION
E01
Slip error
(Low Priority)
Mechanical overload (Slip Monitoring) or missing signal
from encoder.
Check door for obstruction.
Ensure the pulse output from the encoder is connected to terminal P2 on the controller.
Verify that the encoder pulse output is set correctly.
E02
Direction Error - occurs during
setup only (Low Priority)
The direction of the motor is incorrect. The encoder
count must increment positively while the door is
moving in the open direction.
Use the Motor Direction parameter to set the correct direction for the motor and
encoder.
E03
No Signal From Pulse
Generator - occurs during
setup only. (Low Priority)
No pulse input detected from the encoder.
Check door for obstruction.
Ensure the pulse output from the encoder is connected to terminal P2 on the Controller.
Verify that the encoder pulse output is set correctly.
E04 Speed Error Door moves faster/slower then Expected Check door for obstruction.
E05 N/A
E06 N/A
E07
Run Timer Exceeded
(Low Priority)
The Run Timer has expired. Check the Run Timer parameter to ensure a correct value.
E08
Safety Edge Test Fail
(Medium Priority)
The Reversing Edge test has failed
Check the connections from the reversing edge to the controller. If using the Seywave
wireless system, check operation of connected host and remote door sensor.
E09
Safety Edge Connection
(Medium Priority)
The Reversing Edge connection cannot be veried.
Check the connections from the reversing edge to the controller. If using the Seywave
wireless system, check operation of connected host and remote door sensor. Verify
Safety edge is not activated.
E10
Safety Edge 1 Activated
(Low Priority)
The Reversing Edge has been activated Check for obstruction in door’s path.
E11
Safety Edge 2 Activated
(Low Priority)
The Reversing Edge has been activated Check for obstruction in door’s path.
E12
Lifting Force Exceeded
(Low Priority)
The torque limit has been exceeded
If the torque limiting feature is being used, adjust the Torque Limit parameter to suit the
application.
E13 No Encoder movement Encoder did not move when expected Check for obstruction. Check connection from Position Sensor to Motor.
E14
Absolute Encoder Comm Loss
(Top Priority)
Communication with the absolute encoder has been
lost.
Check the connections between the encoder and the controller.
E15
Installation Fault
(Low Priority)
An error occurred during Quick Setup Re-perform Quick Setup
E16 Encoder fault Encoder communication is not correct Check Position Sensor. Verify connections.