Manual 37365A GCP-30 Series Packages - Genset Control
Page 34/179 © Woodward
Analog Controller Outputs (BPQ, XPQ)
Some controls may be purchased with the BPQ or XPQ packages. These packages offers an alternative to a
three-position controller output to a voltage regulator or speed control. If this option is selected, additional confi-
guration screens are displayed for tuning. The analog PID controller is a closed-loop control loop with the con-
trolled system (usually a first-order lag element). The PID loop parameters (gain K
PR
, reset T
N
, and derivative
T
V
) can each be modified individually.
Kp T1
Controlled system (PT1)PID controller
Kpr Tn Tv
Lag element (Tt)
Influenciny
quantity
Tt
Figure 3-1: Control loop
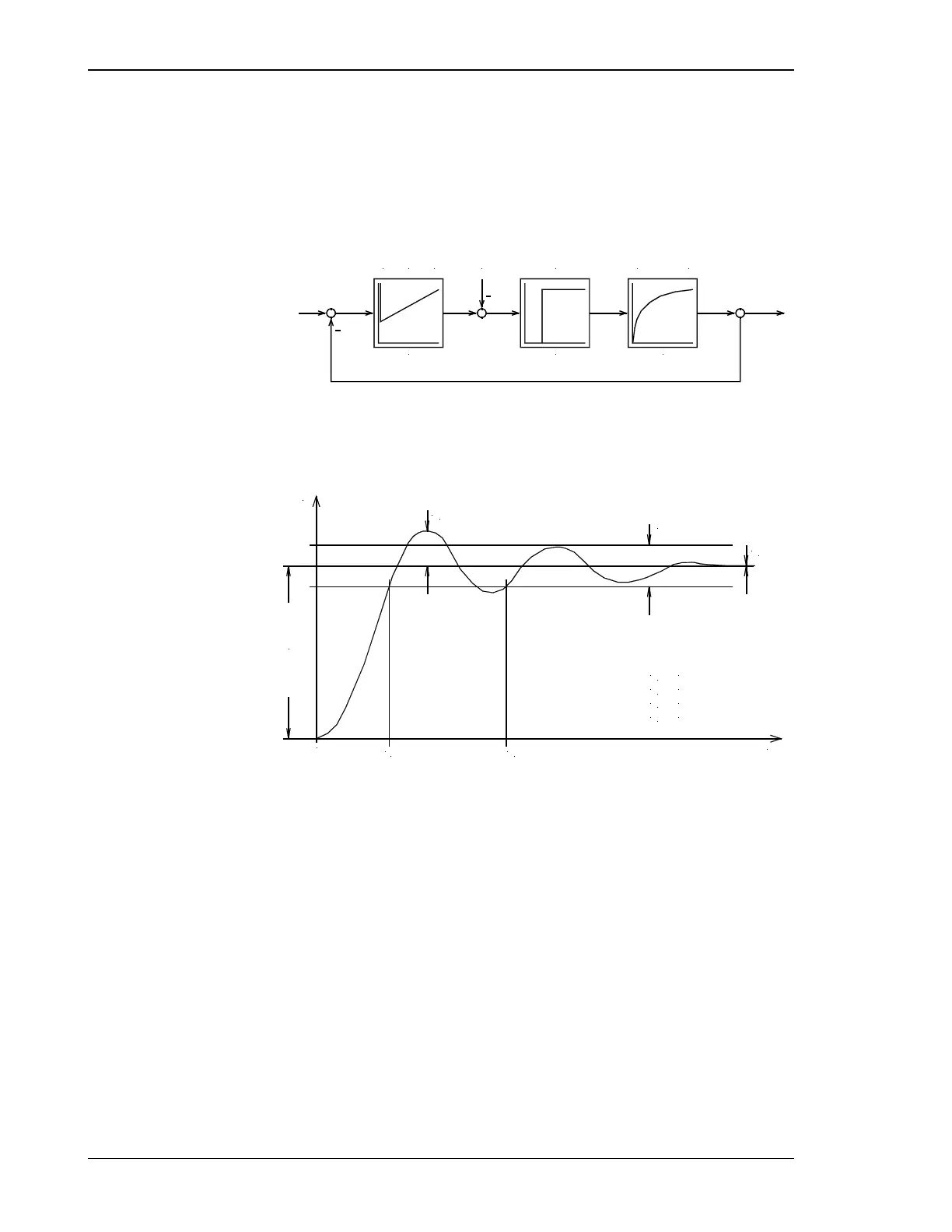
If an abrupt disturbance variable is applied to the control loop, the reaction of the controlled system can be rec-
orded at the output as a function of time (step response).
0
t/s
x
T
T
T
x
x
d
m
x
d
x
m
T
Rise time
Overshoot
System deviation
rise
rise
Tolerance band
Settling time
sett
sett
disturbance variable
Figure 3-2: Step response (Example)
The step response consists of multiple values; these are required for adjusting the controller to its optimum set-
ting:
Rise time T
rise
: The period of time it takes for a control variable to re-enter a predefined tolerance range after a
disturbance has been applied or the reference input has been changed. The time starts when the control variable
leaves the predefined tolerance range and ends when the control variable first re-enters the predefined tolerance
range.
Settling time T
sett
: The period of time it takes for a control variable to permanently re-enter a predefined toler-
ance range after a disturbance has been applied or the reference input has been changed. The time starts when the
control variable leaves the predefined tolerance range and ends when the control variable permanently re-enters
the predefined tolerance range.
Overshoot x
m
: The greatest deviation passed the defined set point value when the system is transitioning from
one steady-state condition to a new steady-state condition following the application of a disturbance to the sys-
tem or reference input variable (x
m Optimal
≤ 10 %).
System deviation x
d
: Permanent deviation from the final value (PID controller: x
d
= 0).

 Loading...
Loading...










