97
VH6 series inverter can save two groups of motor parameters, and select the current working motor parameter
group through P0-25. Two motors can set their own name plate parameters, and need to complete their own
parameter tuning before operation. The parameters of motor parameter group 1 are P1 parameters, and the
parameters of motor parameter group 2 are A2 parameters.
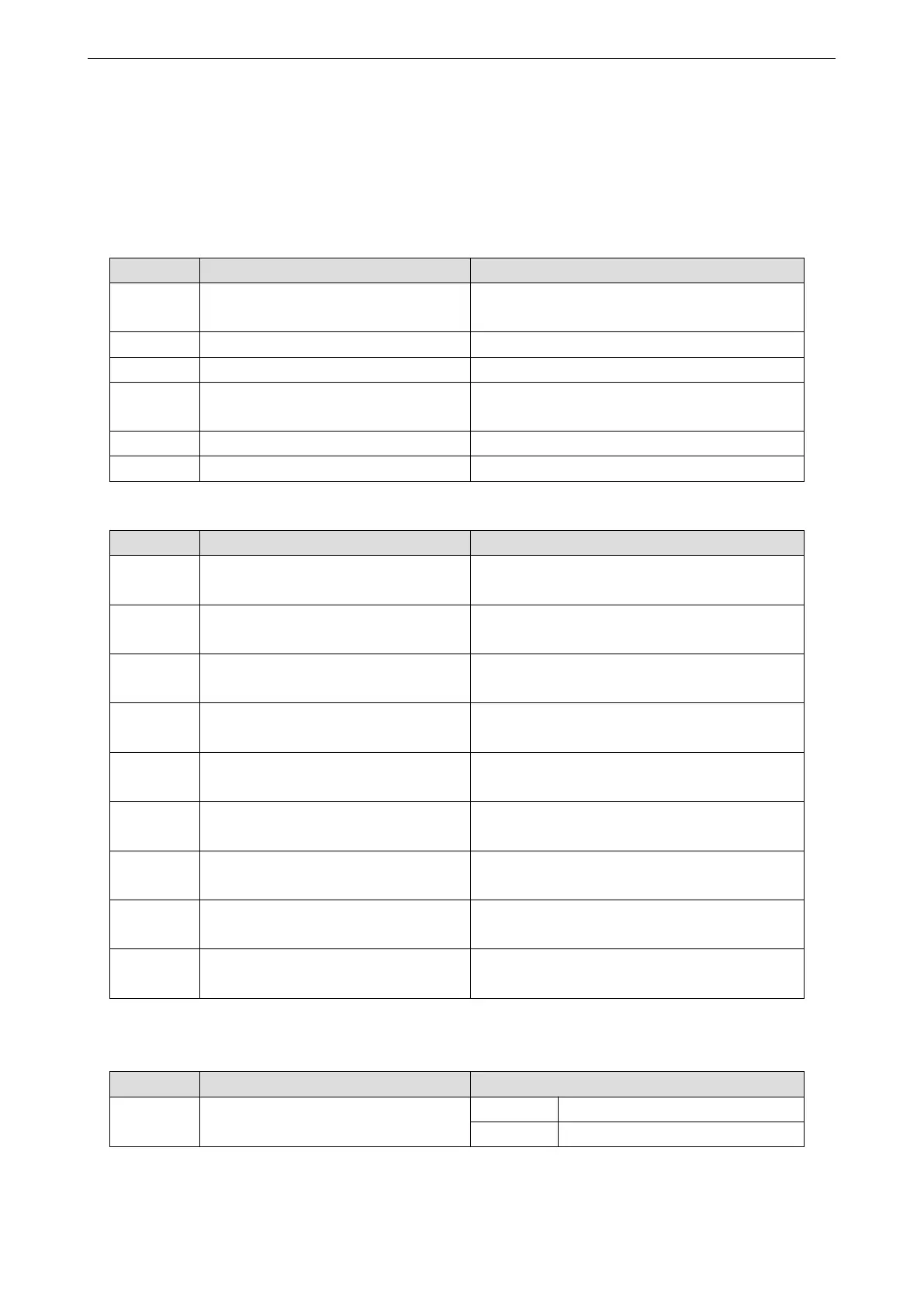
4-2-2. Group P1 First motor parameters
0: Common asynchronous motor
1: Synchronous motor
0.01A~655.35A (VFD power ≤55kW)
0.1A~6553.5A (VFD power >55kW)
0.01Hz~max output frequency
P1-00 ~ P1-05 are the parameters on the motor nameplate. It is recommended to input these parameters
manually after getting the new product.
Asynchronous motor stator resistance
0.001Ω~65.535Ω (VFD power≤55kW)
0.0001Ω~6.5535Ω (VFD power>55kW)
Asynchronous motor rotor resistance
0.001Ω~65.535Ω (VFD power≤55kW)
0.0001Ω~6.5535Ω (VFD power>55kW)
Leakage inductance of asynchronous
motor
0.01mH~655.35mH (VFD power≤55kW)
0.001mH~65.535mH (VFD power>55kW)
Mutual inductance of asynchronous
motor
0.01mH~655.35mH (VFD power≤55kW)
0.001mH~65.535mH (VFD power>55kW)
asynchronous motor no load current
0.01A~P1-03 (VFD power≤55kW)
0.1A~P1-03 (VFD power>55kW)
Synchronous motor stator resistance
0.001Ω~65.535Ω (VFD power ≤55kW)
0.0001Ω~6.5535Ω (VFD power >55kW)
Synchronous motor D-axis inductance
0.01mH~655.35mH (VFD power ≤55kW)
0.001mH~65.535mH (VFD power >55kW)
Synchronous motor Q-axis inductance
0.01mH~655.35mH (VFD power ≤55kW)
0.001mH~65.535mH (VFD power >55kW)
Synchronous motor back EMF
coefficient
Generally, P1-06~P1-10 cannot be viewed on the motor body, and the response data will be automatically
calculated and generated after the motor is tuned.
VH6 supports various encoder types. Different encoder needs to be equipped with different expansion cards.
Please select expansion card correctly when using. But the asynchronous motor only uses the ABZ incremental
encoder and the resolver encoder.
 Loading...
Loading...