163
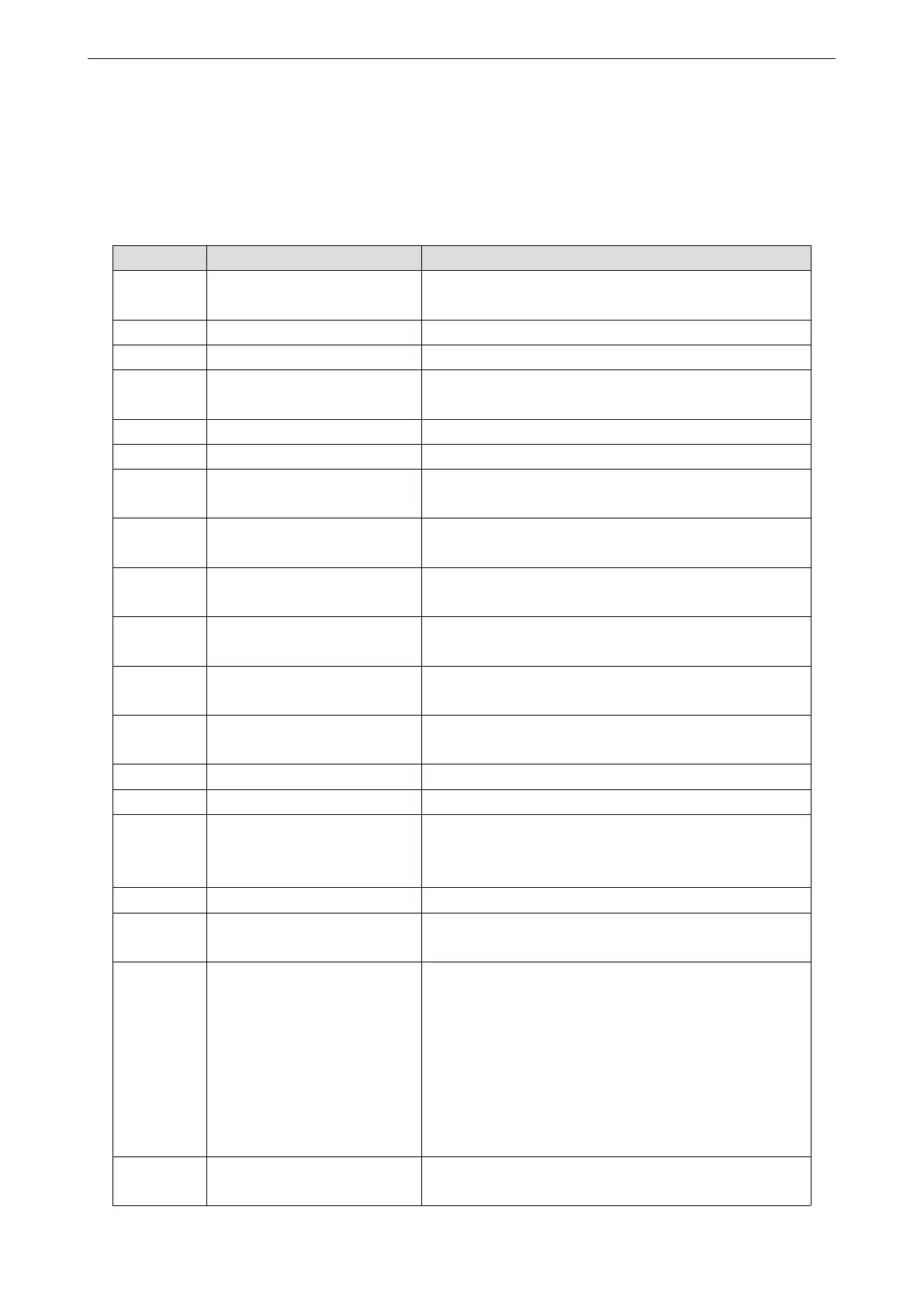
4-2-19. Group A2 Second motor parameters
VH6 provides two sets of motor control parameters, which can set motor nameplate parameters, encoder
parameters and VF vector performance parameters respectively.
Group A2 function code corresponds to motor 2. All parameters and application methods of group A2 are the
same as those of motor 1.
0: Common asynchronous motor
1: Synchronous motor
0.01A~655.35A (VFD power ≤55kW)
0.1A~6553.5A (VFD power >55kW)
0.01Hz~max output frequency
Asynchronous motor stator
resistance
0.001Ω~65.535Ω (VFD power ≤55kW)
0.0001Ω~6.5535Ω (VFD power >55kW)
Asynchronous motor rotor
resistance
0.001Ω~65.535Ω (VFD power ≤55kW)
0.0001Ω~6.5535Ω (VFD power >55kW)
Leakage inductance of
asynchronous motor
0.01mH~655.35mH (VFD power ≤55kW)
0.001mH~65.535mH (VFD power >55kW)
asynchronous motor mutual
inductance
0.01mH~655.35mH (VFD power ≤55kW)
0.001mH~65.535mH (VFD power >55kW)
asynchronous motor current
without load
0.01A~P1-03 (VFD power ≤55kW)
0.1A~P1-03 (VFD power >55kW)
0: ABZ incremental encoder
1: Resolver
Encoder phase order/main
direction; only ABZ
incremental encoder
0: Forward direction
1: Reverse direction
Polar logarithm of rotation
Speed feedback PG
disconnection detection time
0.0~10.0 (0.0: speed feedback disconnection detection
ineffective)
Motor 2 parameter
self-learning
Ones bit:
0: No operation
1: Static self learning 1(part of parameters)
2: Motor rotation self-learning
3: Static self learning 2 (part of parameters)
Tens bit:
0: Asynchronous motor
1: Synchronous motor
0: VF control
1: No speed sensor vector control (SVC)
 Loading...
Loading...