115
Speed tracking closed loop current
The maximum current in the speed tracking process is limited within the set value of "speed tracking current". If
the setting value is too small, the effect of speed tracking will be worse.
Acceleration deceleration mode
0: Linear acceleration and deceleration
1: Continuous S-curve acceleration and deceleration
2: Intermittent S-curve acceleration and deceleration
0: Linear acceleration and deceleration
The output frequency increases or decreases linearly. Four kinds of acceleration and deceleration time (P0-18 ~
P0-19, PC-03 ~ PC-08) can be selected through the multi-function input terminal (P2-00 ~ P2-09).
1: Continuous S-curve acceleration and deceleration
When the target frequency is fixed, the output frequency is increased or decreased according to the S curve. It is
suitable for the case of slow start or shutdown.
2: Intermittent S-curve acceleration and deceleration
It is suitable for the real-time change of target frequency and rapid response. The output frequency is increased
or decreased in real time according to S curve. It is suitable for occasions with high comfort requirements and
fast response.
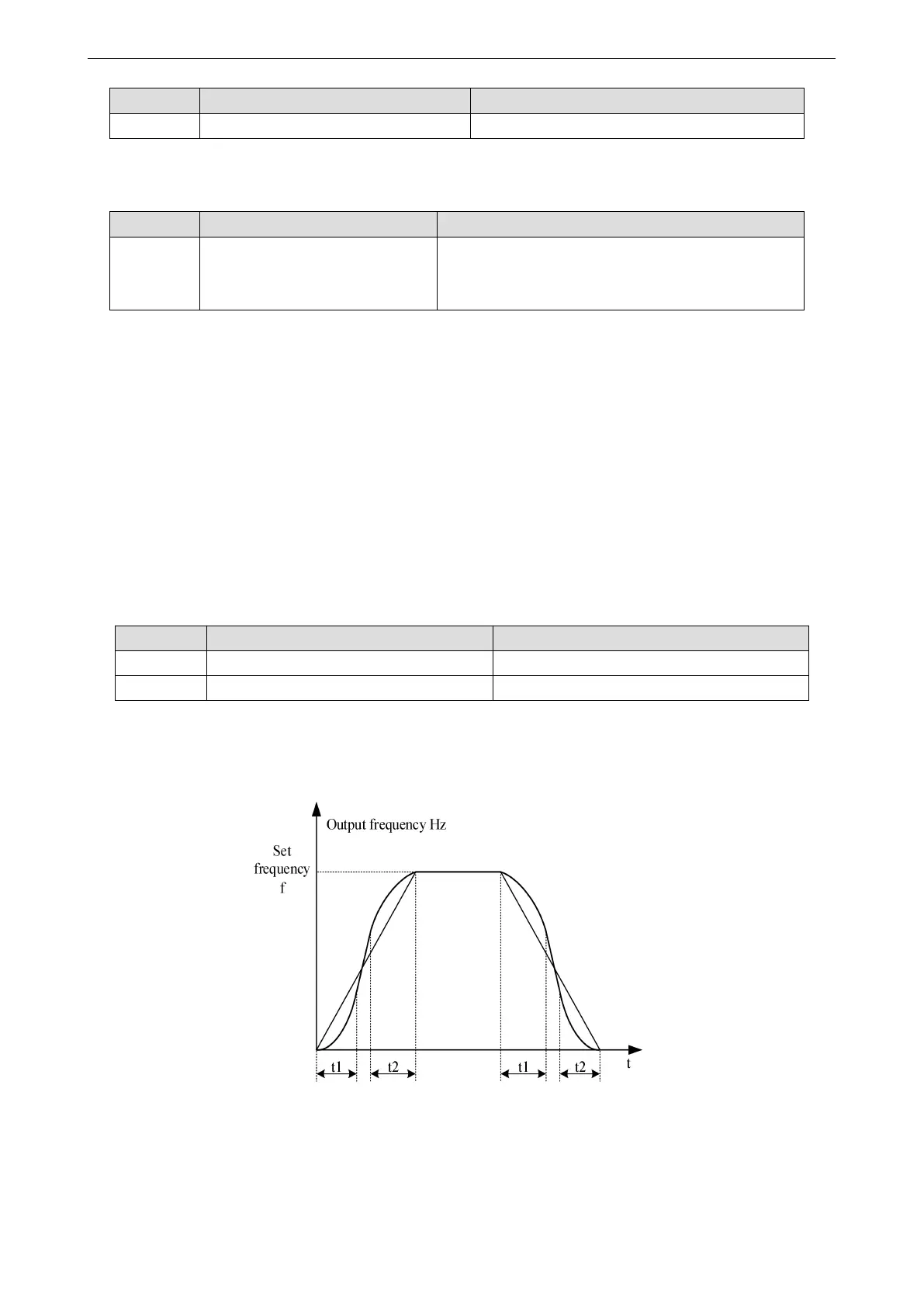
S curve starting segment proportion
S curve end segment proportion
When selecting static S-curve, the sum of parameters P4-20 and P4-21 must be less than or equal to 100%.
In the figure, t1 is the proportion of the beginning segment of S-curve defined by P4-20, t2 is the proportion of
the end segment of S-curve defined by P4-21, and the slope of output frequency change between t1 and t2 is a
fixed value, which is linear acceleration and deceleration. As shown in the figure.
 Loading...
Loading...