8 Operation
8.7.7 Absolute Encoder Home Offset
8-36
8.7.7 Absolute Encoder Home Offset
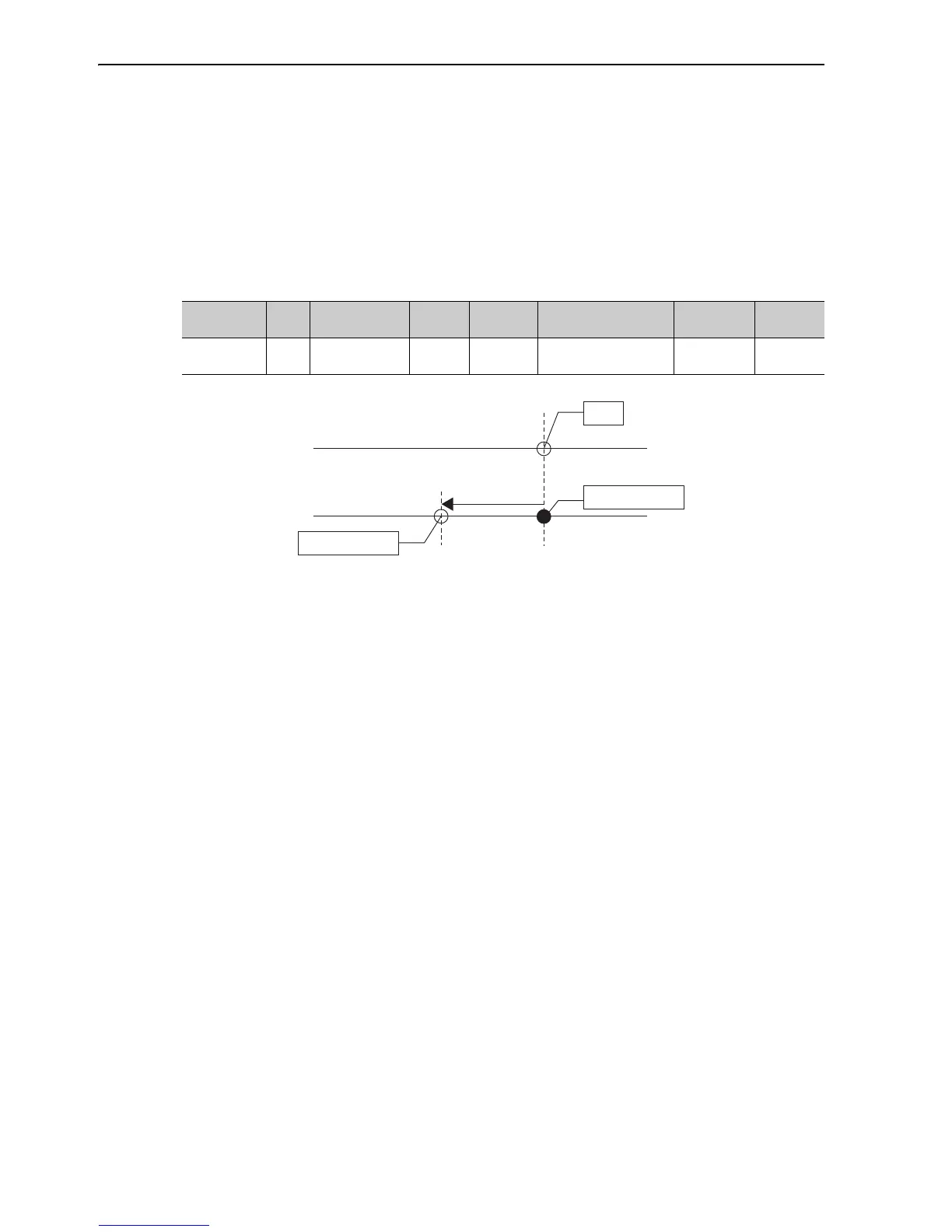
If you use an absolute encoder, you can set an offset between the encoder position and the machine position.
The setting is not made with a parameter. A Σ-V-SD EtherCAT (CoE) command is used as shown below.
If you use an absolute encoder, the offset between the encoder position and the machine position (Position
Actual Value: index 6064h) is set in reference units. When the power supply is turned OFF and ON again or
when parameters are enabled with index 2300h, the offset is added to the Position Actual Value at 6064h.
For details, refer to
Σ
-V-SD series User’s Manual For Command Profile EtherCAT (CoE) Communications
Reference (manual no.: SIEP S800000 95).
Index
Sub
Index
Name
Data
Type
Access Setting Range
Default
Value
EEPROM
607Ch 0 Home offset DINT RW
-536870912 to
536870911
0Yes
Position actual value
(Object 6064h)
Home offset:
Object 607Ch
(PnB46)
Encoder position
Encoder position
Zero
Encoder home
 Loading...
Loading...






