Parameter List
7
7.14 Y: Application Features
YASKAWA TOEPYAIH6B01A HV600 AC Drive Narrow Bypass Installation & Startup 235
7.14 Y: Application Features
◆ Y1: Application Basics
No.
(Hex.)
Name Description
Default
(Range)
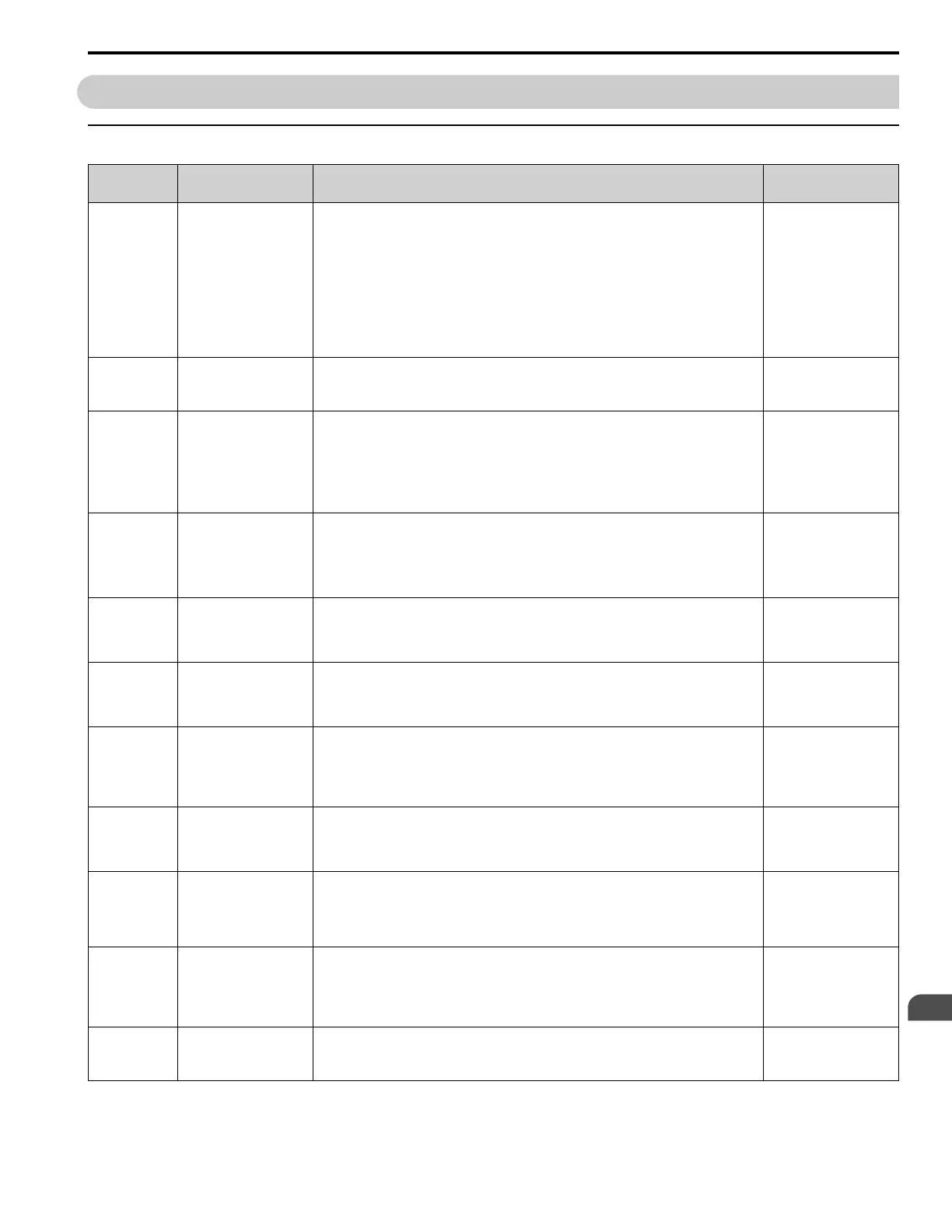
Y1-04
(3C03)
RUN
Sleep Wake-up Level Sets the level that feedback must be less than for the time set in Y1-05 [Sleep Wake-up Level Delay
Time] to start the system. This level also sets the wake up level when the drive is in Sleep Mode.
When Y1-04 < 0, the feedback level must decrease this amount to less than the setpoint.
Note:
• When PID operates in reverse mode, the feedback value must increase to more than the start
level for the time set in Y1-05 for the system to start.
• When Y2-01 = 5 [Sleep Level Type = Output Frequency (non-PID)], the drive will ignore this
parameter.
• Set this parameter to 0.0 to disable the function.
• Range is 0.00 to 99.99 with sign-bit “-” or “+” indicating Delta to Setpoint.
• Display unit and scaling change when the system units change.
0.0
(-999.9 - +999.9)
Y1-05
(3C04)
RUN
Sleep Wake-up Level Delay
Time
Sets the drive to start the System again when the feedback decreases to less than Y1-04 [Sleep Wake-
up Level] for the time set in this parameter.
1 s
(0 - 3600 s)
Y1-06
(3C05)
RUN
Minimum Speed Sets the minimum frequency at which the drive will run. The drive applies this setting to HAND and
AUTO modes.
Note:
The unit, decimal place, and setting range change when the Y1-07 [Minimum Speed Units]
setting changes:
• Y1-07 = 0 [Hz]: The setting range is 0.0 Hz to E1-04 Hz.
• Y1-07 = 1 [RPM]: The setting range is 0 RPM to (E1-04 × 60) RPM.
0.0 Hz
Determined by Y1-07
Y1-07
(3C06)
Minimum Speed Units Sets the units and decimal place for Y1-06 [Minimum Speed].
0 : Hz
1 : RPM
Note:
Changing Y1-07 will set Y1-06 [Minimum Speed] to the default value.
0
(0, 1)
Y1-08
(3C07)
RUN
Low Feedback Level Sets the lower detection level for the PID feedback.
Note:
• Unit and decimal place change when the system units change.
• Range is 0.00 to 99.99 with sign-bit “-” indicating Delta to Setpoint.
0.00%
(0.00 - 99.99%)
Y1-09
(3C08)
RUN
Low Feedback Lvl Fault Dly
Time
Sets the delay time for the drive to detect an LFB [Low Feedback Sensed] fault after the feedback
level decreases to less than the value set in Y1-08 [Low Feedback Level].
Note:
Set Y1-10 = 0 [Low Feedback Selection = Fault (and Digital Output)] to enable this parameter.
10 s
(0 - 3600 s)
Y1-10
(3C09)
Low Feedback Selection Sets the drive response when the feedback decreases to less than Y1-08 [Low Feedback Level] for
longer than the time set in Y1-09 [Low Feedback Lvl Fault Dly Time].
0 : Fault (and Digital Output)
1 : Alarm (and Digital Output)
2 : Digital Output Only
0
(0 - 2)
Y1-11
(3C0A)
RUN
High Feedback Level Sets the upper detection level for the PID feedback.
Note:
• Unit and decimal place change when the system units change.
• Range is 0.00 to 99.99 with sign-bit “+” indicating Delta to Setpoint.
0.00%
(0.00 - 99.99%)
Y1-12
(3C0B)
RUN
High Feedback Lvl Fault
Dly Time
Sets the delay time between when the drive detects high feedback until the drive faults on an HFB
[High Feedback Sensed] fault.
Note:
This parameter is effective only when Y1-13 = 0 [High Feedback Selection = Fault (and Digital
Output)].
5 s
(0 - 3600 s)
Y1-13
(3C0C)
High Feedback Selection Sets the drive response when the feedback increased to more than Y1-11 [High Feedback Level] for
longer than the time set in Y1-12 [High Feedback Lvl Fault Dly Time].
0 : Fault (and Digital Output)
1 : Alarm (and Digital Output)
2 : Digital Output Only
0
(0 - 2)
Y1-14
(3C0D)
RUN
Feedback Hysteresis Level Sets the hysteresis level for low and high level feedback detection.
Note:
Unit and decimal place change when the system units change.
0.0%
(0.0 - 10.00%)

 Loading...
Loading...









