8.6 Autotuning without Host Reference
8.6.4 Operating Procedure
8-28
6.
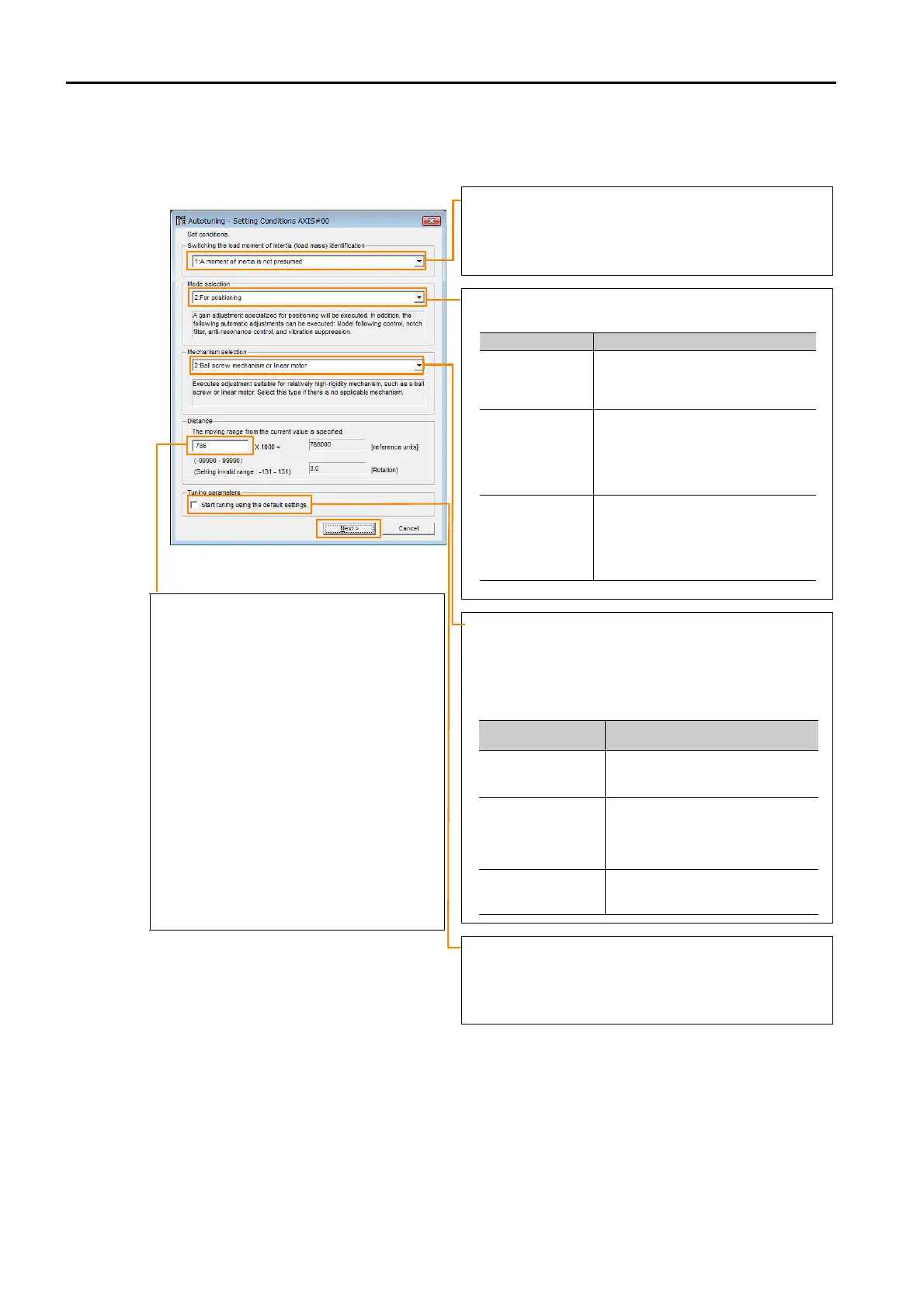
Set the conditions in the Switching the load moment of inertia (load mass) identifica-
tion Box, the Mode selection Box, the Mechanism selection Box, and the Distance
Box, and then click the Next Button.
• Switching the load moment of inertia (load mass)
identification Box
Specify whether to estimate the moment of inertia.
0: A moment of inertia is presumed. (default setting)
1: A moment of inertia is not presumed.
• Mode selection Box
Set the mode.
• Mechanism selection Box
Select the type according to the machine element to
drive.
If there is noise or if the gain does not increase, better
results may be obtained by changing the rigidity type.
Select the type according to the following guidelines.
• Tuning parameters Box
Specify the parameters to use for tuning.
If you select the Start tuning using the default set-
tings Check Box, the tuning parameters will be returned
to the default settings before tuning is started.
• Distance Box
Set the travel distance.
Movement range: -99,990,000 to
+99,990,000 [reference units]
Minimum setting increment for travel dis-
tance: 1,000 [reference units]
Negative values are for reverse operation
and positive values are for forward opera-
tion from the current position.
Default settings:
Rotary Servomotors: Approx. 3 rotations
Direct Drive Servomotors: Approx. 0.3
rotations
Linear Servomotors: Approx 90 mm
Set the distance to the following values or
higher. To ensure tuning precision, we rec-
ommend that you use approximately the
default distance setting.
Rotary Servomotors: 0.5 rotations
Direct Drive Servomotors: 0.05 rotations
Linear Servomotors: 5 mm
Mode Selection Description
1: Standard
Standard gain adjustment is per-
formed. In addition to gain adjust-
ment, notch filters and anti-resonance
control are automatically adjusted.
2: For positioning
Tuning is performed for positioning
applications. In addition to gain
adjustment, model following control,
notch filters, anti-resonance control,
and vibration suppression are auto-
matically adjusted.
3: For positioning
especially to pre-
vent overshooting
Tuning is performed for positioning
applications with emphasis on elimi-
nating overshooting. In addition to
gain adjustment, notch filters, anti-
resonance control, and vibration sup-
pression are automatically adjusted.
Mechanism
Selection
Description
1: Belt mechanism
Tuning is performed for a mecha-
nism with relatively low rigidity, e.g.,
a belt.
2: Ball screw mech-
anism or linear
motor
Tuning is performed for a mecha-
nism with relatively high rigidity, e.g.,
a ball screw or Linear Servomotor.
Use this setting if there is no other
appropriate setting.
3: Rigid model
Tuning is performed for a mecha-
nism with high rigidity, e.g., a rigid
body system.

 Loading...
Loading...






