Continued on next page.
No.
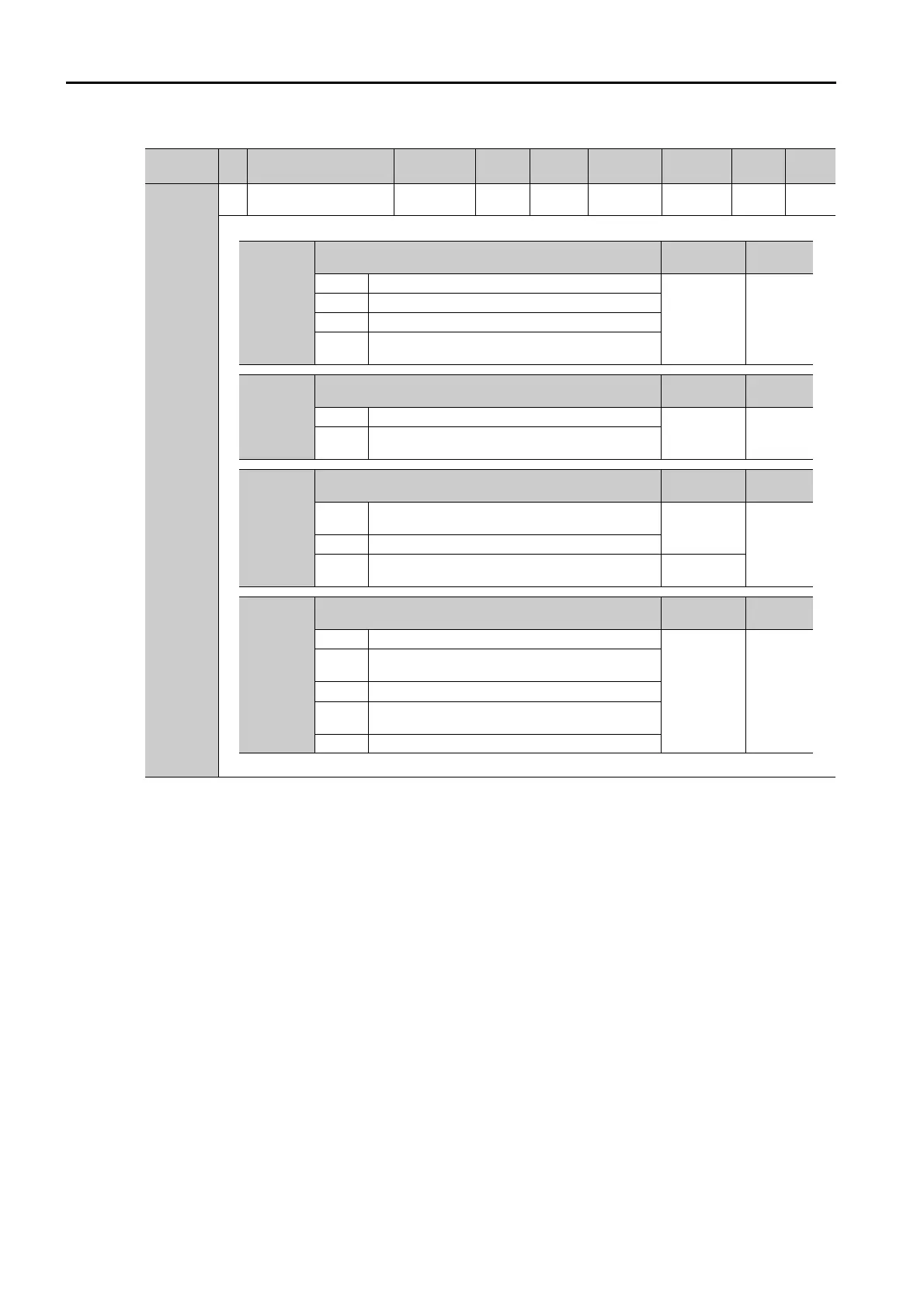
n.X
MECHATROLINK Command Position and Speed Control
Option
Applicable
Motors
Reference
0 Reserved setting (Do not use.)
All
*1
1 Use TLIM as the torque limit.
2 Reserved setting (Do not use.)
3
Use P_TLIM or N_TLIM as the torque limit when
P_CL or N_CL in the OPTION field is ON.
n.X
To rq u e Co ntro l O ptio n
Applicable
Motors
Reference
0 Reserved setting (Do not use.)
All
*1
1
Use the speed limit for torque control (VLIM) as the
speed limit.
n.X
Encoder Usage
Applicable
Motors
Reference
0
Use the encoder according to encoder specifica-
tions.
All
page 6-331 Use the encoder as an incremental encoder.
2
Use the encoder as a single-turn absolute
encoder.
Rotary
n.X
External Encoder Usage
Applicable
Motors
Reference
0 Do not use an external encoder.
Rotary page 10-6
1
The external encoder moves in the forward direc-
tion for CCW motor rotation.
2 Reserved setting (Do not use.)
3
The external encoder moves in the reverse direc-
tion for CCW motor rotation.
4 Reserved setting (Do not use.)

 Loading...
Loading...






