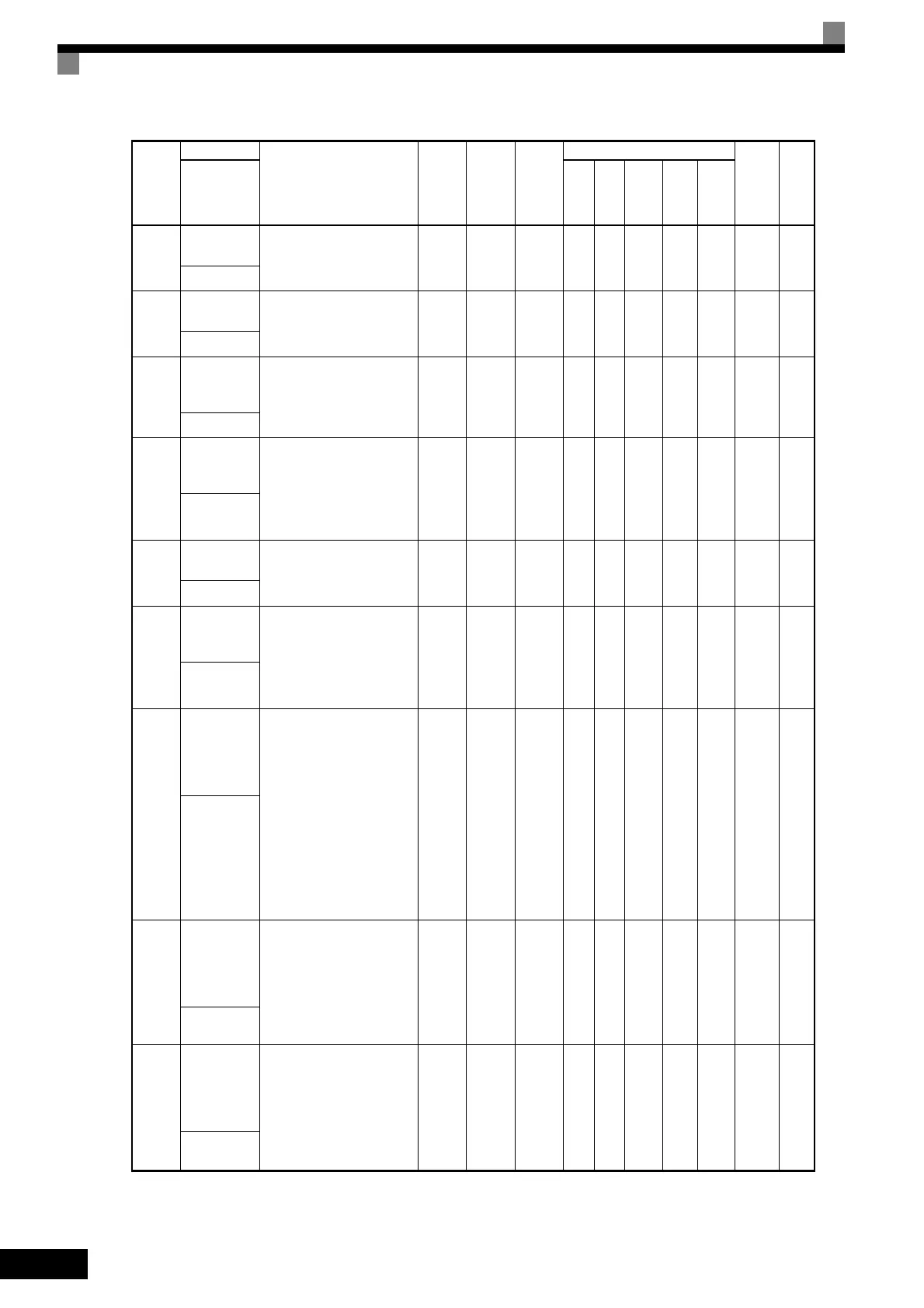
5-16
b5-06
PID upper
limit
Sets the upper limit after PID-
control as a percentage of the
maximum output frequency.
0.0 to
100.0
100.0% Yes A A A A A 1AAH
6-107
PID 上限
b5-07
PID offset
adjustment
Sets the offset after PID-con-
trol as a percentage of the
maximum output frequency.
-100.0
to
+100.0
0.0% Yes A A A A A 1ABH
6-107
PID 偏置
b5-08
PID first
order lag time
constant
Sets the time constant for low
pass filter for PID-control
outputs in 1-second units.
Not usually necessary to set.
0.00 to
10.00
0.00 s Yes A A A A A 1ACH
6-107
PID 延迟时间
b5-09
PID output
characteris-
tics selection
Select forward/reverse for
PID output.
0: PID output is forward.
1: PID output is reverse
(highlights the output
code)
0 or 1 0 No A A A A A 1ADH
6-107
输出特性选择
b5-10
PID output
gain
Sets output gain.
0.0 to
25.0
1.0 No A A A A A 1AEH
6-107
PID 输出增益
b5-11
PID reverse
output selec-
tion
0: 0 limit when PID output is
negative.
1: Reverses when PID output
is negative.
0 limit when reverse prohibit
is selected using b1-04.
0 or 1 0 No A A A A A 1AFH
6-107
输出逆转选择
b5-12
Selection of
PID feed-
back com-
mand loss
detection
0: No detection of loss of
PID feedback.
1: Detection of loss of PID
feedback.
Operation continues
during detection, with the
malfunctioning contact
not operating.
2: Detection of loss of PID
feedback.
Coasts to stop during
detection, and fault
contact operates.
0 to 2 0 No A A A A A 1B0H
6-108
反馈丧失检出
b5-13
PID feed-
back com-
mand loss
detection
level
Sets the PID feedback loss
detection level as a percent
units, with the maximum out-
put frequency at 100%.
0 to
100
0% No A A A A A 1B1H
6-108
反馈丧失
检出值
b5-14
PID feed-
back com-
mand loss
detection
time
Sets the PID feedback loss
detection level in s units.
0.0 to
25.5
1.0 s No A A A A A 1B2H
6-108
反馈丧失检出
时间
Con-
stant
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Opera-
tion
Control Methods
MEMO-
BUS
Regis-
ter
Page
Display
V/f
V/f
with
PG
Open
Loop
Vec-
tor
1
Flux
Vec-
tor
Open
Loop
Vec-
tor
2
 Loading...
Loading...









