172 Parameters
Squared Squared ratio for centrifugal pump and fan applications.
With squared U/f ratio the noise level is lower for most
operating frequencies. Not recommended for permanent
magnet motors.
1
97.49 Slip gain for scalar Sets gain for slip compensation (in %) while drive is operating
in scalar control mode.
• A squirrel-cage motor slips under load. Increasing the
frequency as the motor torque increases compensates for
the slip.
• Requires parameter 99.04 Motor control mode = Scalar.
0 = No slip compensation.
1...200 = Increasing slip compensation. 100% means full slip
compensation according to parameters 99.08 Motor nominal
frequency and 99.09 Motor nominal speed.
0
0...200 % Slip compensation in %. 1 = 1%
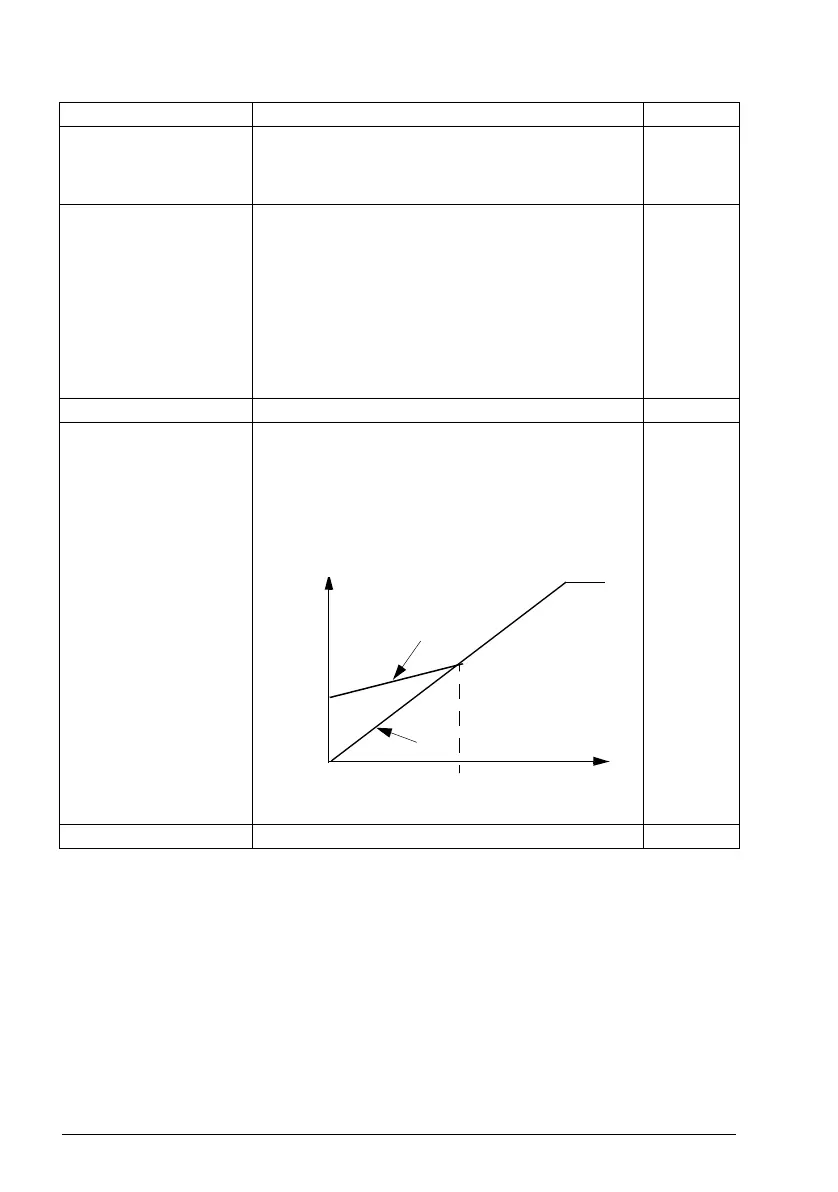
97.94 IR comp max
frequency
Sets the frequency at which IR compensation (set by
parameter 97.13 IR compensation) reaches 0 V. The unit is %
of motor nominal frequency.
IR compensation
When enabled, IR compensation provides an extra voltage
boost to the motor at low speeds. Use IR compensation, for
example, in applications that require a high breakaway
torque.
80.0
1.0...200.0 % IR compensation maximum frequency in %. 1 = 1%
No. Name/Value Description Def/FbEq16
A
B
A = IR compensated
B = No compensation
f (Hz)
Motor voltage
97.13
97.94
ACQ80 FW.book Page 172 Thursday, February 14, 2019 11:33 AM

 Loading...
Loading...








