Program features 55
Notes:
• The above settings are for Ext1 control location. Accordingly, you can set for Ext2
control location.
• The examples provided in this chapter are based on PID set 1. You can set the
desired values for PID trim function's parameters to get the expected result.
The following modes are available:
• Direct
• Proportional, and
• Combined
Direct
The direct method is suitable where you need tension control at fixed rpm/line speed.
In this mode, the PID trimmed output (40.05 Process PID trim output act) is relative to
the maximum speed (parameter 30.12 Maximum speed), torque (30.20 Maximum
torque 1) or frequency (30.14 Maximum frequency). The selection between these can
be made by parameter 40.52 Set 1 trim selection.
The calculated trimmed output is same throughout the speed range with respect to
the stable PID output.
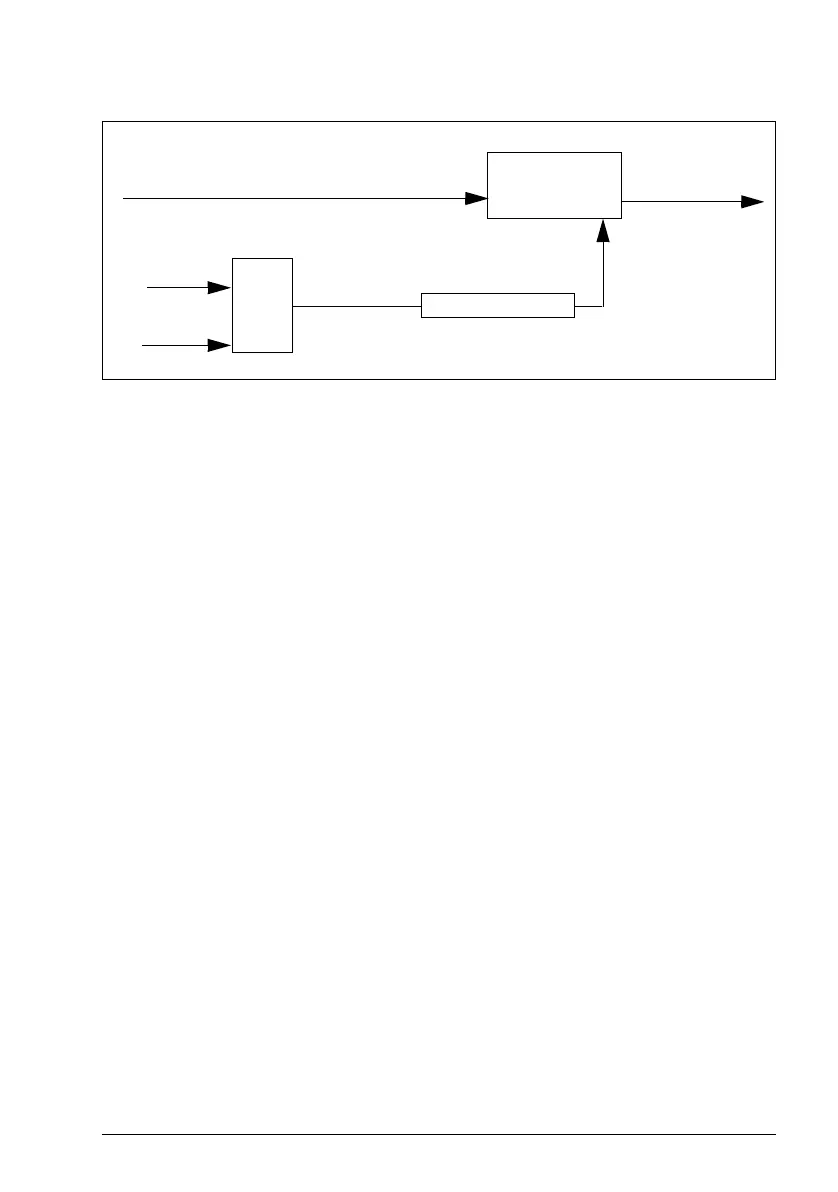
The 40.05 Process PID trim output act is calculated using below formula:
22.12 Ext1 speed ref2
22.11 Ext1 speed ref1
40.05 Process
PID trim output
Process
PID
Ramp input
22.13 Ext1 speed
function =
Add (ref1 + ref2)
PID setpoint
PID actual
or
Par40.05
Par40.01
100
------- ------------------
Par30.12 or 30.20 or 30.14Par40.55=