PROFIsafe 211
Unsig
ned16
(used
as
bits)
5 0 SF_end_ack_req Safety function ending acknowledgement
requested = 1, no acknowledgement requested =
0. Acknowledgement can be done via PROFIsafe.
Note: These values are indicative only and shall
not be used for safety-related decisions about
safety function states (there are other ways to
safely determine the state of a function, for
example, using SS1 to check octet 0 bit 4 and
then octet 5 bit 4: if safe state, then SS1 is
completed).
1 SF_end_ack_req_lo
cal
Local safety function ending acknowledgement
requested = 1, no acknowledgement requested =
0. Acknowledgement can only be done locally via
the FSO I/O if SF_end_ack_req is 0.
Note: These values are indicative only and shall
not be used for safety-related decisions about
safety function states (there are other ways to
safely determine the state of a function, for
example, using SS1 to check octet 0 bit 4 and
then octet 5 bit 4: if safe state, then SS1 is
completed).
2 STO_control_active The drive STO circuit is open. The motor may still
be running.
3 Speed_Pos_value_v
alid
Are the speed and position values valid (= 1) or
not (= 0). The speed value is defined in octets 6
and 7. The position value is defined in octets 8
and 9.
Note: In case octet 2 bit 0 Speed_feedback_type
value is Estimate (= 0), then Position status is
invalid as it requires safety encoder to be valid.
4 FSO_state Safe state = 1
Operational state = 0
5 FSO_mode.0
6 FSO_mode.1
7 Modulating The drive is modulating = 1
It is not known if the drive is modulating or not = 0
WARNING! The only safe way to make
sure that a drive is not modulating is to
activate drive STO. Drive STO can be
activated, eg, with FSO STO or POUS
function.
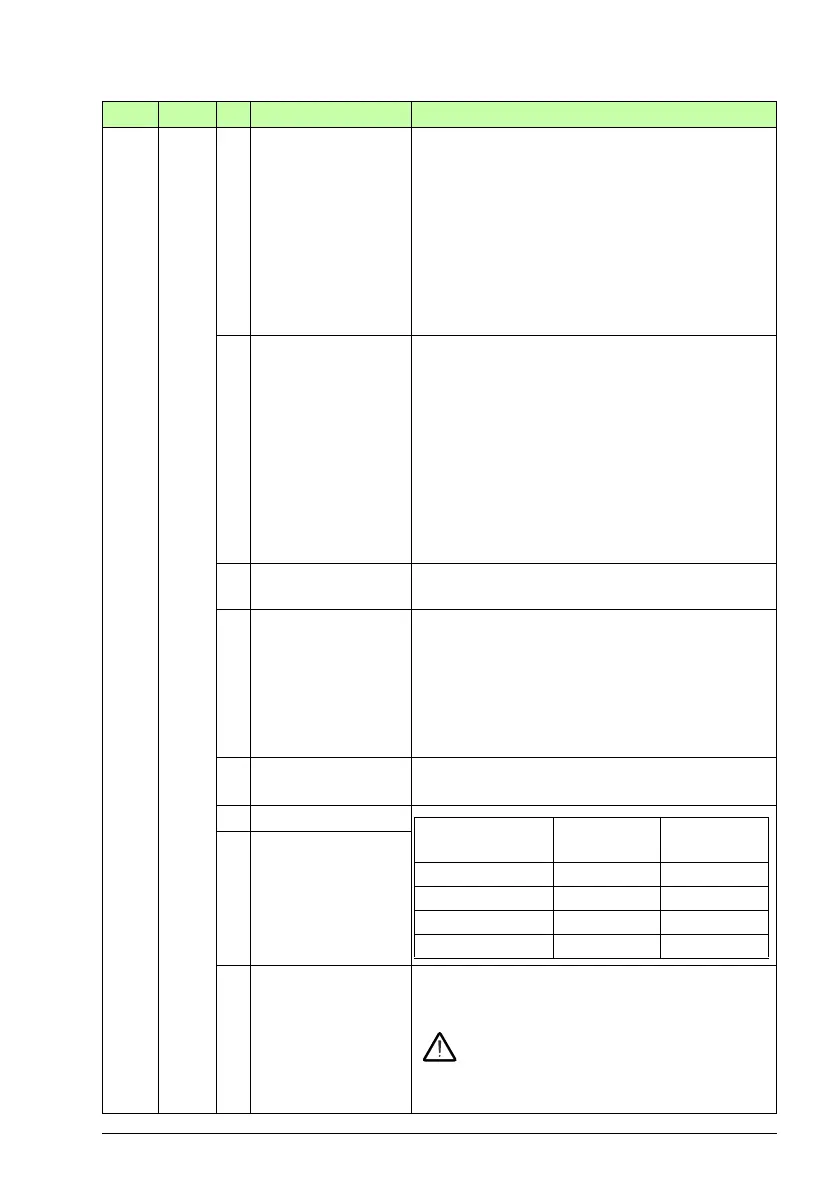
Type Octet Bit Name Description
FSO operating
mode
FSO_mode.1 FSO_mode.0
Start-up 0 0
Running 0 1
Fail-safe 1 0
Configuration 1 1