Safety functions 57
This restriction is relevant only when FSO module is used with the safe speed
estimate, not when it is used with the encoder.
For more information, see the firmware manual of your drive.
Ramp monitoring
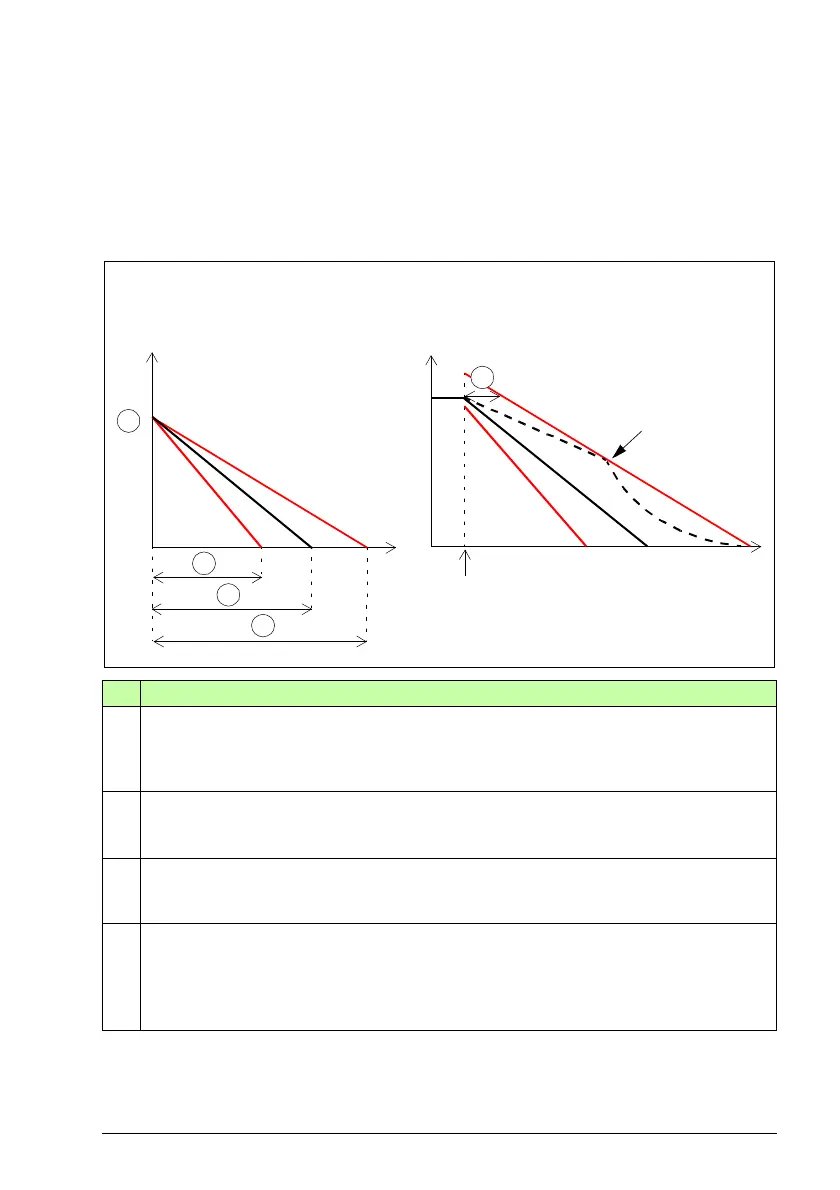
The ramp monitoring is configured with five parameters as described below.
ID Description
A Minimum deceleration time from the Scaling speed to zero. Configured for each SARn
ramp,
n = 0…1 separately.
For example for SAR0: parameter SARx.11 SAR0 min ramp time to zero.
B Target time for deceleration from the Scaling speed to zero. Configured for each SARn
ramp, n = 0…1 separately.
For example for SAR0: parameter 200.102 SAR0 ramp time to zero.
C Maximum deceleration time from the Scaling speed to zero. Configured for each SARn
ramp, n = 0…1 separately.
For example for SAR0: parameter SARx.12 SAR0 max ramp time to zero.
D Initial allowed range for the SARn ramp: value of parameter SARx.02 SAR initial allowed
range. This parameter moves the location of the maximum ramp forward on the time
axis, when monitoring is started, that is, at time of D, the maximum limit is the value of
the motor speed, that was in use when the monitoring started. Common for all ramps
SARn, n = 0…1.
Speed
B
C
A
E
Speed
Motor speed
Ramp monitoring started
Defining the ramp monitoring limits
Ramp monitoring using the ramps
D
Limit hit
*
*
* Lower monitoring limit is always 30 rpm below actual
speed.Starting point of the upper monitoring limit is based
on maximum deceleration slope (E/C) and D.