Overview 47
possible effect (unnecessary limit hit) if you do not take the slip into account when
defining the trip limits in the FSO module.
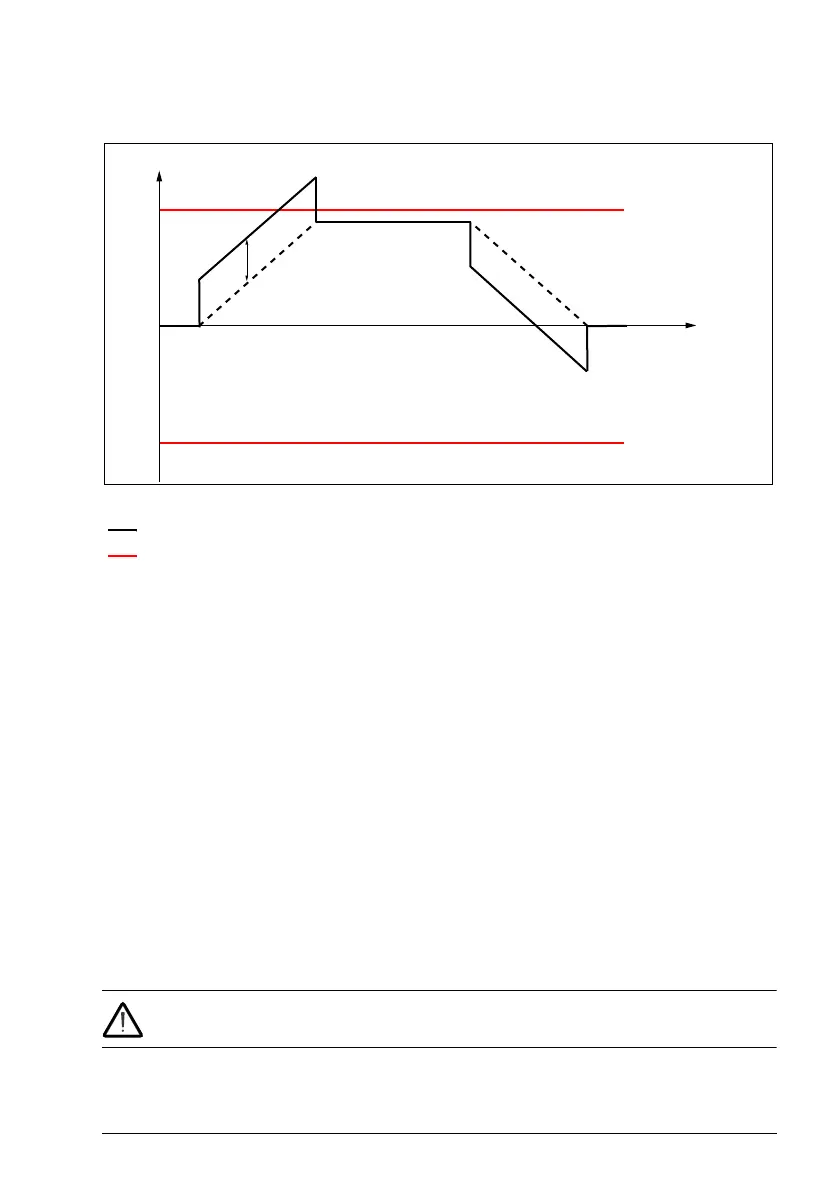
In the example, the motor torque is 100% during the acceleration and the motor slip is
at its maximum value. The FSO module speed estimates (ch1 & ch2) reach the SLS
trip limit even though the compensated value of the actual speed of the motor stays
below the SLS trip limit.
When acceleration is completed, the motor torque decreases. The FSO module
speed estimates show the actual motor speed and the slip is not any more visible in
the signal.
During the deceleration, when the motor torque is -100%, the motor slip is again in its
maximum value. Because of the torque direction, FSO speed estimates are below the
actual motor speed (amount of the slip). After the FSO safe speed estimates reach 0
rpm, they begin to show reverse (negative) motor speed due to the negative motor
slip. The FSO module starts to compare the safe speed estimation to the negative
SLS trip limit value. Because the trip limit is much lower than the estimated speed,
there will be no fault trip.
Mute time feature
WARNING! The mute time increases the response time of the safety system.
This must be considered in the design of the safety system.
The FSO module has a mute time feature that can be used to suspend the monitoring
limits for a short period so that spurious trips can be eliminated. The feature is
- - - Actual speed
Safe speed estimate
SLS trip limits