Refitting the upper arm - concluding procedures
Use this procedure for the concluding refitting of the upper arm.
NoteAction
xx1100000263
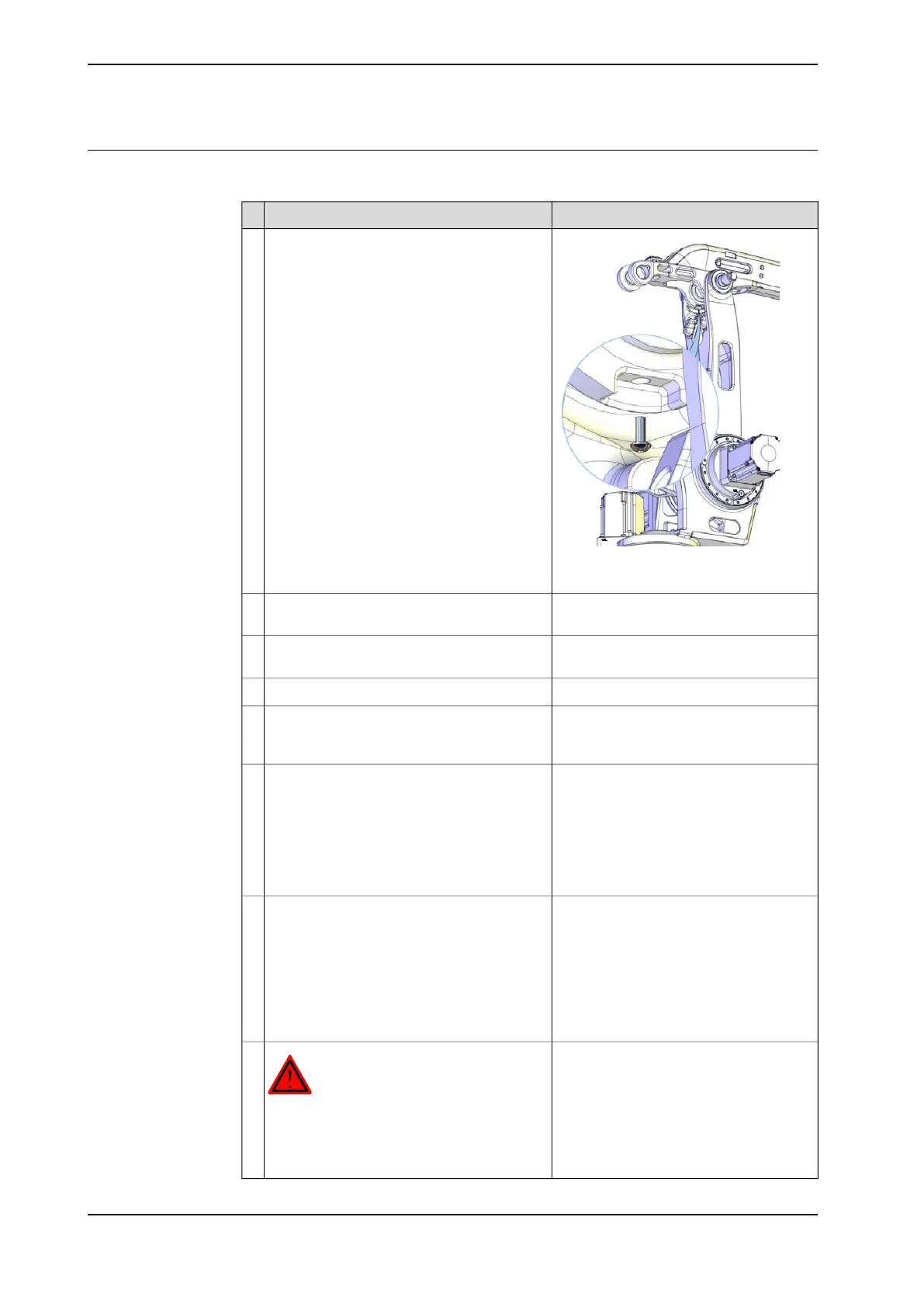
Apply locking liquid (Loctite 243) in the two
holes for the set screws and fit the screws.
1
Tightening torque: 34 Nm.
Wipe residual grease and contamination off
the shafts.
2
See Replacing the tilthouse unit on
page 188.
Refit the tilthouse unit.3
See Replacing parallel rod on page 257.Refit the parallel rod.4
See section
• Replacing the cable harness, upper
end (incl. axis 6) on page 157
Refit the cable harness in the upper arm.5
See Replacing the upper arm on page 209.
• Replacing linkage - upper link arm
on page 225
• Replacing linkage - lower link arm
on page 233
• Replacing the linkage - link on
page 240
Refit the linkage system starting with the link.6
Pendulum Calibration is described in
Operating manual - Calibration Pendulum,
enclosed with the calibration tools.
Recalibrate the robot.7
Axis Calibration is described in Calibrat-
ing with Axis Calibration method on
page 357.
General calibration information is included
in section Calibration on page 347.
DANGER
Make sure all safety requirements are met
when performing the first test run. These are
further detailed in the section First test run
may cause injury or damage on page 26.
8
224 Product manual - IRB 460
3HAC039842-001 Revision: P
© Copyright 2012-2018 ABB. All rights reserved.
4 Repair
4.4.3 Replacing the upper arm
Continued

 Loading...
Loading...






