4 Repair
4.3.1. Replacement of cable harness, axes 1-4
2533HAC022033-001 Revision: K
© Copyright 2004-2011 ABB. All rights reserved.
3. Remove the rear cover plate from the robot by
removing its attachment screws.
Shown in the figure Location of
cable harness on page 251.
4. Disconnect the earth cable. Attachment point is shown in the
figure Location of cable harness
on page 251!
5. Disconnect connectors R1.MP and R1.SMB. Attachment points are shown in
the figure Location of cable
harness on page 251.
6. Pull the cable and connectors up through the cable
guide in the center of the frame.
7. Disconnect all connectors at motors 1 and 2. Specified and shown in the figure
Location of cable harness on
page 251!
8. Open the SMB cover carefully.
The cable between the battery and the SMB-unit may
stay connected, in order to avoid an update of the
revolution counter. Be careful not to let the weight of
the cover strain the cable!
In order to remove the cover completely, the
connector R1.G must be disconnected! This causes
a necessary updating of the revolution counter!
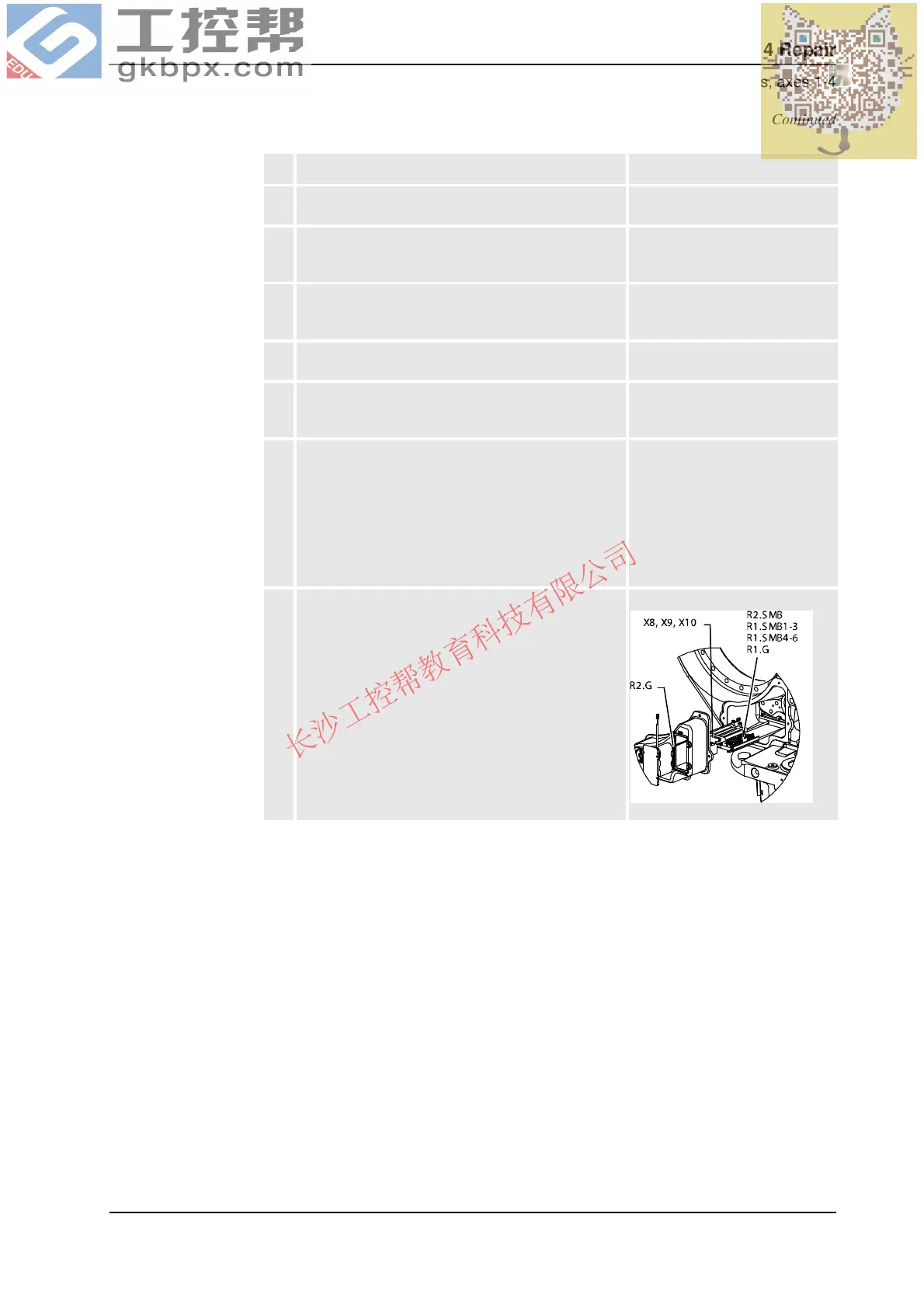
9. Disconnect connectors R2.SMB, R1.SMB1-3,
R1.SMB4-6 from the SMB unit.
Disconnect X8, X9 and X10 if the brake release
board is located in frame.
xx0200000118.wmf
Action Note
Continued
Continues on next page
 Loading...
Loading...









