Geometries with no orientation support
100 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
See also
Configuration parameters for a Delta Two-dimensional robot on page 99
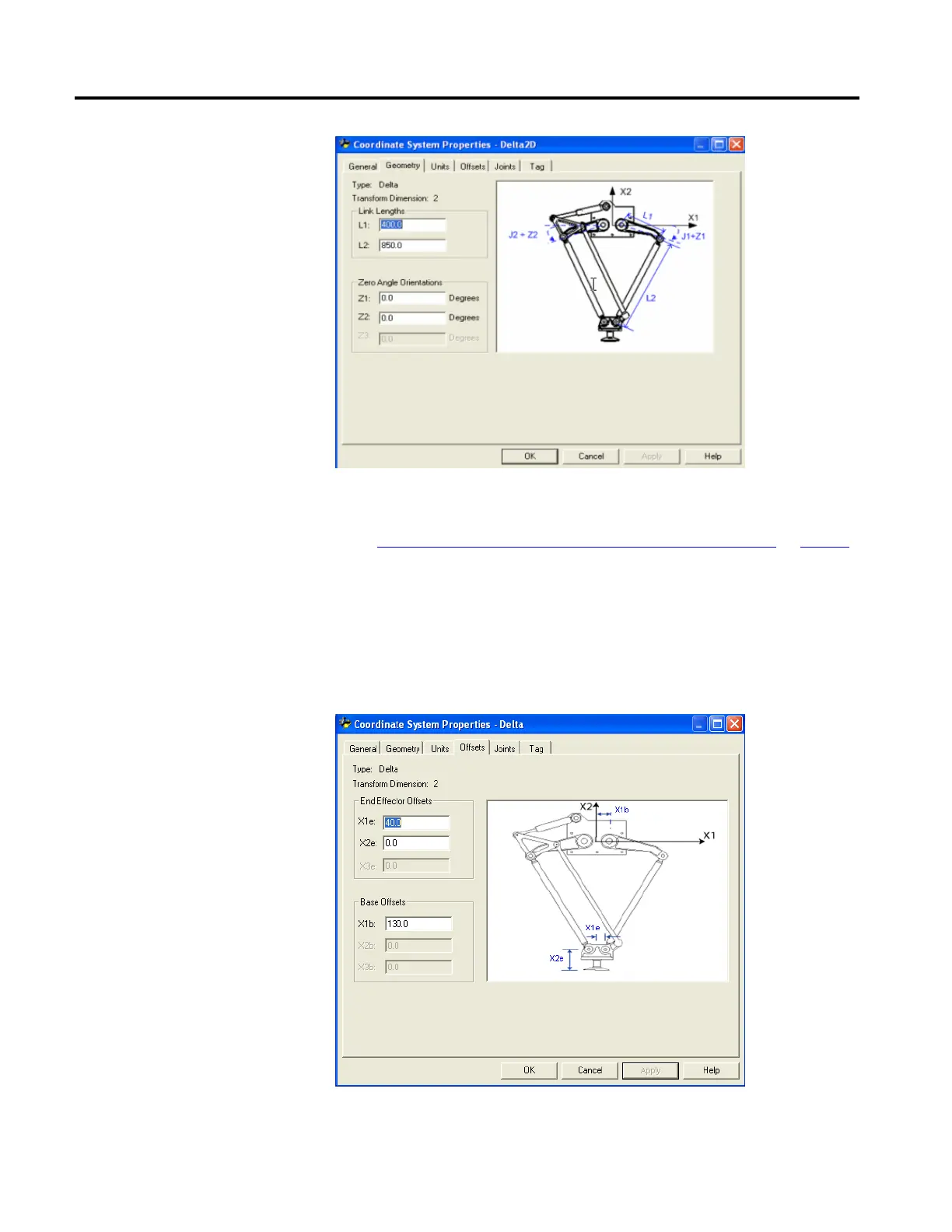
The X1b base offset value is available for the two-dimensional Delta robot
geometry. Enter a value equal to the distance from the origin of the robot
coordinate system to one of the actuator joints.
Enter the base offset value for the two-dimensional Delta robot on the Offset tab
in the Coordinate System Properties dialog box.
Two-dimensional robot
 Loading...
Loading...

