Geometries with orientation support
116 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
Point conversion on page 125
RxRyRz, flip, mirror flip condition on page 126
Translation and rotation example on page 132
The Cartesian Point is composed of the following two components:
• Translation - describes the vector connecting two Cartesian points
• Orientation - the three ordered rotations around the X, Y, and Z Cartesian
axes
Translation Specification
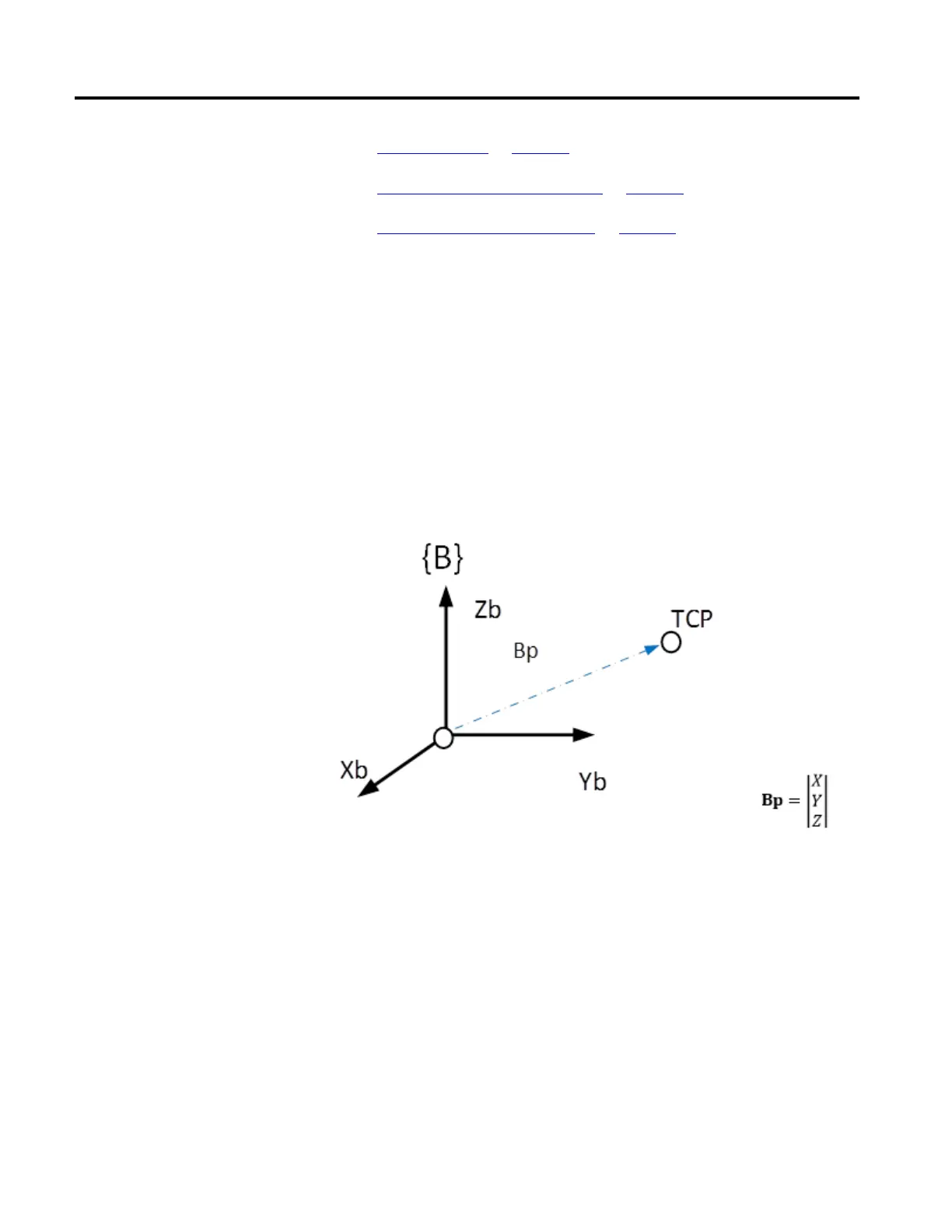
Typically, a point in space is specified by the three coordinates of the point with
respect to the base coordinate system as shown in the following figure. The three
coordinates of the point are X, Y, Z. This specification is also called 3 by 1 position
vector with respect to the base coordinate system.
Cartesian Point Specification
 Loading...
Loading...

